



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
APENDICE 5 - USO Y APLICACIONES DE LOS PROGRAMAS
A5.1 INTRODUCCION
Como se dice en la introducción la obra se presenta divida en cuatro volúmenes, cada uno incluye un diskette que contiene el programa correspondiente al tema del volumen y algunos programas auxiliares.
Los programas realizan el cálculo electromagnético, dimensional y de pesos aproximados de las distintas partes activas de la máquina correspondiente y de sus características funcionales.
Concretamente el programa correspondiente a este volumen resuelve el problema de calcular:
Motores asincrónicos trifásicos de rotor bobinado, jaula simple, jaula profunda y doble jaula (MOTOCA).
El programa es de tipo «batch», para ejecutarlo es necesario haber preparado previamente el lote de datos correspondiente que se puede hacer con un editor o bien utilizando la facilidad del programa (interactivo) EDIMAQ, que asiste al usuario en la preparación de un lote de datos o su modificación.
La impresión de las ejecuciones del programa de cálculo se puede hacer directamente direccionando la salida sobre la impresora (adecuadamente "seteada") o bien direccionando la salida a un archivo en disco.
Por último el programa DIBMAQ permite cargar un ejemplo, y luego modificarlo con los datos de diseño obtenidos en la corrida y dibujar cortes longitudinales y transversales de la máquina calculada, variando la ubicación y el tamaño de la ventana de observación.
A fin de utilizar este conjunto de programas en una forma eficiente es aconsejable cargarlos en el disco rígido.
Si se desea trabajar directamente sobre diskettes es conveniente hacer una copia y trabajar en ella.
A título de ejemplo describimos en forma genérica el uso en detalle.
A5.2 PREPARACION DEL LOTE DE DATOS
Se ejecuta el programa EDIMAQ que presenta un menú que propone el tipo de máquina cuyos datos se desea preparar o modificar.
Los datos del problema específico se van ingresando o modificando uno a uno, y cuando se termina debe indicarse el nombre del archivo ("file") en el cual se graba el lote de datos.
La preparación de datos también puede hacerse con un editor de textos (EDIT, u otro equivalente).
A5.3 EJECUCION DEL CALCULO
La ejecución de un programa de cálculo en este caso MOTOCA inicia preguntando donde están los datos, debe responderse indicando el archivo previamente preparado, luego pregunta donde deben ir los resultados debiendo responderse también.
Es conveniente que los resultados queden grabados en un archivo para poderlo ver utilizando también para ello alguno de los editores citados o bien la modalidad BROWSE (que muestra sin permitir modificaciones), o el recomendable "shareware" LIST que trabaja en modo análogo.
También puede direccionarse la salida a consola (CON) o a la impresora (PRN).
A5.4 UTILIZACION DEL PROGRAMA DE DIBUJO
Para aprovechar correctamente las facilidades disponibles, es conveniente iniciar el uso del programa de dibujo disponiendo de la salida de cálculo en papel para leer los datos a medida que el programa los requiere.
El programa contiene un ejemplo, y ofrece distintas opciones una de las cuales permite modificar los datos, introduciéndose lógicamente los que corresponden al ejemplo que se desea graficar.
Siendo este programa gráfico, según la plaqueta de video que la computadora dispone, puede ser necesario cargar en forma residente un simulador gráfico.
El programa permite variar la ventana de observación del dibujo (efecto zoom) a fin de visualizar detalles del mismo.
Estos dibujos pueden imprimirse por vuelco de pantalla ("PRINT SCREEN"), como generalmente la relación de aspecto de la pantalla no coincide con la impresora se debe variar adecuadamente esta última según corresponda.
Normalmente para que la impresora grafique se debe ejecutar previamente un programa de comunicación con la impresora, definiendo adecuadamente ciertos parámetros (GRAFIX).
En una de las opciones el programa permite generar un archivo .DXF que puede ser interpretado por los poderosos programas de dibujo "CAD" hoy difundidos en todo el mundo (Ò AutoCad, Ò MicroCadam, etc.).
A5.5 OTRA FORMA DE PREPARAR LOS DATOS
Hemos visto que EDIMAQ prepara un archivo de datos para el cálculo que se quiere desarrollar, como dicho con un editor (EDIT, u otro programa equivalente) es posible introducir modificaciones en este archivo.
También puede preparase en esta forma el lote de datos completo, pero esta tarea está dificultada por la falta de guía, es posible entonces preparar los datos agregando renglones de comentarios (que inician con una "C" o un "*" en la primera columna) de manera de ayudar a ubicar correctamente los valores.
Para facilitar esta tarea existe un archivo TABLA.TXT que contiene comentarios y espacios disponibles para preparar el lote de datos correspondiente.
Al usar esta alternativa se debe seleccionar la parte de datos que efectivamente interesan para el caso particular que se encara.
El programa SELTAR actuando sobre este último archivo separa los renglones que inician con "C" o "*" y que considera comentarios, de los otros que considera datos generando un nuevo archivo de datos adecuado para ser correctamente interpretado por los programas de cálculo.
A5.6 REVISION DE RESULTADOS (PARA DOCENTES)
Un programa llamado FILMAQ lee el informe de cálculo de una máquina (cualquiera) y lo sintetiza generando un archivo de datos que utiliza el programa de dibujo.
Esta facilidad no debe ser utilizada por los alumnos durante el proceso de aprendizaje ya que el elevado grado de automatización, y la rapidez con que se puede ejecutar el trabajo atentan contra la reflexión y la maduración de los conceptos que se intentan inculcar.
A5.7 EJERCICIOS PROPUESTOS
A fin de experimentar como se ejecuta el programa se propone un lote de datos correspondientes a un ejemplo que en su momento fue objeto de publicación en la presentación del programa.
El interesado en ejecutarlo puede generar un archivo con los datos que se indican en la tabla, respetando el encolumnamiento de 10 caracteres por columna, debe tenerse cuidado que los datos incluyan en todos los casos el punto decimal, mientras que para los valores nulos puede dejarse en blanco el espacio.
A5.7 Tabla de datos para la corrida del programa «MOTOCA»
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 |
| 1 - NOM (identificación de la corrida) | |||||||
| EJEMPLO DE CALCULO | MOTOR ASINCRONICO | DE JAULA PROFUNDA | fecha: | ||||
| 2 - datos básicos | |||||||
| POT | UU | FO | TC | HNPOL | COFI | REND | PASO(1) |
| 15. | 380. | 50. | 3. | 4. | 0.83 | 89. | 0 |
| 3 - datos de dimensionamiento | |||||||
| TAUP | HLI | WB | QPF | SAT | HK4 | FAP(1) | |
| 150. | 200. | 0.016 | 4. | 1.55 | 0 | 0 | |
| 4 - determinación arrollamiento estatórico | |||||||
| DELTA | HNVIN | HNVIAS | DENC | COEAP | RHO | DCOND | CI |
| 0.4 | 0 | 0 | 0 | 0 | 0 | 0 | 4. |
| 5 - canales radiales de ventilación | |||||||
| ACAN1 | NCAN1 | KENFR | ACAN2 | NCAN2 | |||
| 0 | 0 | 0 | 0 | 0 | |||
| 6 - determinación de la ranura | |||||||
| TIPO | BB2 | BB1 | HH4 | HH3 | HH2 | EA | BC |
| 3. | 0 | 0 | 0 | 1.5 | 1. | 0.4 | 0 |
| 7 - tipo de rotor y número de ranuras | |||||||
| TIPO | Q2 | ANPR | DENCB | COEAPB | RHO | DCOND | DEJE |
| 3. | 38. | 0.05 | 0 | 0 | 0 | 0 | 0 |
| 8 - dimensiones del rotor | |||||||
| BARVOL | FAP2 | CALT/TC | DENCA | COEAPA | RHO | DCOND | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 9 - dimensionamiento ranura rotórica (si doble jaula, interna) | |||||||
| TIPO | BB2 | BB1 | HH4/42 | HH3 | HH2 | EA | |
| 2. | 0 | 0 | 0 | 0 | 0 | 0 | |
| 10 - para doble jaula, datos jaula externa | |||||||
| BB2 | HH4 | RCICT | DENCB | COEAPB | RHO | DCOND | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 11 - dimensionamiento anillo jaula externa | |||||||
| BARVOL | - | CALT/TC | DENCA | COEAPA | RHO | DCOND | |
| 0 | - | 0 | 0 | 0 | 0 | 0 | |
| 12 - caracterísiticas rotor y cálculo de pérdidas | |||||||
| CAC2 | SHEL | FREBW | EBW | PERVEN | FACMAY | C2C1 | |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | |
| 13 - características del hierro: inducción | |||||||
| BW | BW | BW | BW | BW | BW | BW | BW |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 14 - características del hierro: pérdidas específicas | |||||||
| WK | WK | WK | WK | WK | WK | WK | WK |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
| 15 - características del hierro: intensidad de campo | |||||||
| AS | AS | AS | AS | AS | AS | AS | AS |
| 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 |
A5.8 BIBLIOGRAFIA
- "EL MOTOR ASINCRONICO, CALCULO Y PROYECTO ASISTIDO POR COMPUTADORA" - J. N. L. Sacchi - A. Rifaldi - Revista Electrotécnica - enero/febrero 1986.
- "CALCULO AUTOMATICO DE MAQUINAS ELECTRICAS - EL DIBUJO" - J. N. L. Sacchi - A.Rifaldi - Revista Electrotécnica - mayo/junio 1989.
A5.9 PROBLEMAS
Algunos de los problemas que siguen se han resuelto con una propuesta que no necesariamente es única, mientras que para otros sólo se da su enunciado.
El lector, al ejercitarse debe intentar comprender cuales son los caminos que se adoptan para resolver el problema, en base a sus conocimientos tratar de descubrir otros, y explorarlos comparando las soluciones y decidiendo en forma justificada.
PROBLEMA: 5.1
Se conocen los siguientes datos de un motor asincrónico con rotor bobinado:
| Potencia nominal | 82 kW |
| Velocidad nominal | 480 r.p.m. |
| Frecuencia | 50 Hz |
| Tensión nominal estator conexión estrella | 380 V |
| Corriente nominal estatórica | 169 A |
| Conductores activos por fase estator | 90 |
| Tensión rotórica a circuito abierto conexión estrella | 396 V |
| Corriente nominal rotórica | 132 A |
| Ranuras rotóricas | 144 |
| Densidad de corriente en el rotor | 4.5 A/mm² |
se desea saber:
- a) ¿Cuál es el número de conductores activos por fase del rotor?
- b) ¿Cuántas ranuras estatóricas tiene?
- c) ¿Teniendo en cuenta que el devanado rotórico está realizado con planchuelas rectangulares, cuál es la dimensión aproximada de la ranura (alto y ancho)?
Conocidas las tensiones de línea tanto del estator como del rotor a circuito abierto, como los factores de forma tanto para el estator como para el rotor tienen el mismo valor, la frecuencia es la misma (circuito rotórico abierto, motor detenido) y el flujo es el mismo, se pueden plantear las siguientes relaciones:
- UF1 = 2 ´ HK1 ´ HK2 ´ HK3 ´ FO ´ HN1 ´ WB
- UF2 = 2 ´ HK1 ´ HK2 ´ HK3 ´ FO ´ HN2 ´ WB
se puede suponer tanto para el estator como para el rotor que el producto 2 por los factores de devanado es igual a 2.1:
- 219.6 = 2.1 ´ 50 ´ 90 ´ WB V (1)
- 228.9 = 2.1 ´ 50 ´ HN2 ´ WB V (2)
de la ecuación (1) se obtiene el flujo:
WB = 219.6 / (2.1 ´ 50 ´ 90) = 0.02324 Wb
reemplazando en (2) se tiene el número conductores por fase del rotor:
HN2 = 228.9 / (2.1 ´ 50 ´ 0.02324) = 93.8
se adoptan 94 conductores que es un número entero, pero se debe verificar que el devanado sea realizable, es decir, se calcula cual es el número de conductores activos por ranura que resulta:
CAC2 = 94 / 48 = 1.95
este a su vez debe ser entero y normalmente para motores de rotor bobinado de las características del que estamos considerando se adopta igual a 2 ó 4, en consecuencia en este caso se fija igual a 2 y se recalcula en número de conductores activos por fase que resulta:
HN2 = 48 ´ 2 = 96
El número de ranuras por polo y por fase del rotor resulta:
QPF2 = 144 / (12 ´ 3) = 4
como para este tipo de motores normalmente se adopta para el rotor un valor de ranuras por polo y fase igual a la del estator más 1 resulta:
QPF1 = QPF2 - 1 = 3
por lo tanto el número de ranuras del estator es:
QQ1 = QPF1 ´ 12 ´ 3 = 108
para determinar la dimensión aproximada de la ranura rotórica se debe primero estimar que diámetro al entrehierro tiene este motor, para ello se utiliza la figura que da el paso polar en función de la potencia en kW y el número de polos, obteniéndose un valor de 590 mm; con este valor se calcula el paso de ranura:
TAUC = p ´ DIAM / QQ2 = 12.86 mm
Con la corriente rotórica y la densidad de corriente se puede determinar la sección del conductor:
SA = CORR2 / DENC2 = 132 / 4.5 = 29.33 mm²
la sección neta por ranura resulta igual al valor antes calculado por el número de conductores activos por ranura:
SC = 29.33 ´ 2 = 58.66 mm²
como este devanado está realizado con planchuela de sección rectangular se estima un coeficiente de aprovechamiento igual a 0.6 y se tiene la sección bruta de ranura:
SN = SC / COEAP = 58.66 / 0.6 = 97.76 mm²
se adopta una relación entre el ancho de ranura y el paso de ranura igual a 0.5 y se determina el ancho de ranura:
B5 = 12.86 ´ 0.5 = 6.4 mm
la altura de la ranura resulta:
H6 = SN / B2 = 97.76 / 6.4 = 15.2 mm
PROBLEMA: 5.2
Se conocen los siguientes datos de un motor asincrónico con rotor en cortocircuito:
| Tensión de línea | 380 V |
| Frecuencia | 50 Hz |
| Conexión | triángulo |
| Grado de protección mecánica | IP44 |
| Número de polos | 4 |
| Diámetro al entrehierro | 190 mm |
| Largo ideal | 200 mm |
| Ranuras estatóricas | 48 |
| Ranuras rotóricas | 38 |
| Entrehierro | 0.4 mm |
se desea saber cual es la potencia que esta máquina puede entregar, lógicamente en valor aproximado en base a una estimación de proyecto.
La potencia de la máquina es igual a:
POT = Ö 3 ´ U ´ I ´ COFI ´ REND (1)
se puede suponer que la tensión de fase es igual a:
UF = 2.1 ´ FO ´ HN ´ WB (2)
la inducción en el entrehierro:
BEN = BETA ´ WB / (HLI ´ TAUP)
si se adopta BEN = 0.65 T y se supone que el factor de saturación vale 1.25 resulta BETA = 1.44.
TAUP = p ´ DIAM / NPOL = 149 mm
podemos calcular el flujo por polo:
WB = 0.65 ´ 0.2 ´ 0.149 / 1.44 = .01345 Wb
si se adopta para la carga térmica un valor de 180 y una densidad de corriente para el devanado estatórico DENC = 5 A/mm² se tiene:
AFC = 180 / 5 = 36 Amp.esp/mm
se estima un rendimiento de 89% y un factor de potencia 0.85, reemplazando valores en (1):
POT = 2.1 ´ 50 ´ 0.01345 ´ 36 ´ p ´ 190 ´ 0.85 ´ 0.89 = 22.9 kW
la corriente de fase resulta:
I = 26.6 A
de la expresión (2):
HN = 380 / (2.1 ´ 50 ´ 0.01345) = 269
se debe verificar si el valor de densidad lineal de corriente coincide con el valor previamente adoptado:
AFC = (3 ´ 269 ´ 26.6) / (p ´ 190) = 35.9 Amp.esp/mm
prácticamente coincide, por lo cual se estima que la máquina puede entregar 23 kW.
PROBLEMA: 5.3
Se conocen los siguientes datos del proyecto de un motor asincrónico:
| Largo ideal | 200 mm |
| Diámetro al entrehierro | 190 mm |
| Número de polos | 4 |
| Coeficiente de saturación | 1.6 |
| Flujo | 0.0139 Wb |
se desea saber el valor de la inducción en el entrehierro y si este se encuentra dentro de valores aceptables.
la inducción en el entrehierro es igual a:
- BEN = BETA ´ WB / (HLI ´ TAUP) (1)
- TAUP = p ´ DIAM / NPOL = 149 mm
en función del coeficiente de saturación resulta BETA = 1.33 y reemplazando valores en la expresión (1) se tiene que la inducción en el entrehierro resulta 0.62 T.
Se observa que este valor es bajo, dentro de valores aceptables, pero dado que el coeficiente de saturación vale 1.6 se deberá verificar el valor de la inducción a un tercio de los dientes del estator y del rotor y evaluar si estos son compatibles.
PROBLEMA: 5.4
Se conocen los siguientes datos del proyecto de un motor asincrónico trifásico:
| Paso de ranura | 12.4 mm |
| Ranura semicerrada trapezoidal | Tipo 3 |
| Ancho de entrehierro | 6.2 mm |
| Ancho de la entrada | 2.0 mm |
| Ancho en el fondo | 10.0 mm |
| Ancho del diente a 1/3 | 6.2 mm |
| Profundidad de la ranura | 29.8 mm |
| Inducción máxima en el entrehierro | 0.62 T |
se desea saber cuanto vale la inducción en el diente y si esta se encuentra dentro de los valores aceptables.
Si se supone que la inducción en la ranura no tiene un valor alto, es decir, que no supera 1.8 T, se considera que el flujo en el entrehierro correspondiente a un paso de ranura se establece en el diente (no hay líneas de campo por la ranura), se puede entonces plantear la siguiente relación:
BEN ´ TAUC = BD ´ A13 ´ FAP (1)
siendo BD la inducción a un tercio del diente, A13 el ancho a 1/3 de su altura y FAP el factor de apilado que se adopta igual a 0.92.
Reemplazando valores en (1):
BD = BEN ´ TAUC / (A13 ´ FAP) = 1.35 T
este valor resulta un poco bajo, pero como se observa que el valor de la inducción en el entrehierro también es bajo (dentro de valores aceptables), se debe controlar el valor de la inducción en el diente del rotor para evaluar globalmente estos resultados.
PROBLEMA: 5.5
Se dispone de un motor asincrónico trifásico con rotor de jaula simple de 10 kW que ha sido bobinado para 380 V y 50 Hz, conexión estrella y de 4 polos.
En el caso de utilizar este motor para el mismo tipo de servicio en una red de la misma tensión pero de 60 Hz se requiere indicar lo siguiente:
- a) Que incidencia tiene el cambio de frecuencia en su funcionamiento y si puede presentarse, en ciertos casos, algún problema en el arranque.
- b) Si se decide alimentar el motor con 60 Hz pero con una tensión de 460 V que cambios de prestación experimentará y que incidencia tiene en la sobreelevación de su temperatura.
PROBLEMA: 5.6
Se dispone de un motor asincrónico trifásico con rotor de jaula simple de 10 kW que ha sido bobinado para 380 V y 50 Hz, conexión estrella y de 4 polos.
El motor acciona una máquina cuyo par antagónico crece con el cuadrado de la velocidad (ventilador centrífugo o compresor), el conjunto motor máquina accionada deberá utilizarse en un país en el cual la frecuencia es de 60 Hz.
- a) ¿Cuales son las consecuencias de utilizar el motor arriba indicado a la frecuencia de 60 Hz?
- b) Frecuentemente en los países de 60 Hz la tensión de distribución es 440 V, si el motor se ha elegido para 380 V y 50 Hz que ocurre cuando se lo alimenta con 440 V.
- c) Seleccionar y especificar un motor de 50 Hz que funcione correctamente en la condición indicada.
El objetivo del trabajo consiste en primer lugar calcular el motor de referencia de 10 kW 380 V y 50 Hz, conexión estrella de 4 polos con factor de potencia 0.88 y rendimiento del 86%.
El segundo paso consiste en calcular el mismo motor pero para una frecuencia de 60 Hz.
Finalmente manteniendo constante la geometría del motor se lo calcula para una tensión de 440 V y 60 Hz.
La tabla de valores comparativos muestra las magnitudes que se consideran significativas para las tres alternativas estudiadas.
TABLA DE VALORES COMPARATIVOS
| Magnitud | Alternativa 1 | Alternativa 2 | Alternativa 3 |
| Tensión (V) | 380 | 380 | 440 |
| Frecuencia (Hz) | 50 | 60 | 60 |
| Corriente de línea (A) | 20.1 | 20.1 | 17.3 |
| Densidad de corriente (A/mm²) | 5 | 5 | 4.32 |
| Sección del conductor (mm²) | 4.02 | 4.02 | 4.01 |
| Coeficiente de saturación calculado | 1.46 | 1.20 | 1.41 |
| Reactancia por fase (ohm) | 1.131 | 1.414 | 1.382 |
| Caída inductiva calculada (%) | 7.6 | 8.2 | 6.5 |
| Conductores activos por fase adoptados | 268 | 268 | 268 |
| Carga térmica | 1754 | 1754 | 1310 |
| Flujo corregido (Wb) | 0.007546 | 0.006230 | 0.007393 |
| Inducción en el entrehierro (T) | 0.69 | 0.61 | 0.68 |
| Inducción a 1/3 diente estator (T) | 1.46 | 1.28 | 1.43 |
| Inducción a 1/3 diente rotor (T) | 1.51 | 1.33 | 1.49 |
| Pérdidas en el hierro (kW) | 0.157 | 0.155 | 0.192 |
| Corriente de barra (A) | 353.6 | 353.6 | 305.4 |
| Densidad de corriente de barra (A/mm²) | 6.5 | 6.5 | 5.6 |
| Sección de barra (mm²) | 54.4 | 54.4 | 54.5 |
| Corriente de anillo (A) | 1075 | 1075 | 928 |
| Densidad de corriente de anillo (A/mm²) | 4.33 | 4.33 | 3.74 |
| Sección de anillo (mm²) | 248.3 | 248.3 | 248.2 |
| Cupla de arranque (p.u.) | 0.96 | 0.63 | 0.91 |
| Corriente de arranque (p.u.) | 5.14 | 4.21 | 5.81 |
| 1.3 × Corriente de arranque (p.u.) | 6.7 | 5.5 | 7.5 |
| Cupla máxima (kgm) | 17.1 | 11.8 | 16.3 |
| Cupla nominal (kgm) | 6.71 | 5.59 | 5.54 |
| Velocidad (vpm) | 1453 | 1743 | 1759 |
| Corriente nominal (A) | 19.1 | 18.9 | 16.4 |
| Resbalamiento (%) | 3.13 | 3.19 | 2.25 |
| Factor de potencia | 0.89 | 0.90 | 0.88 |
| Rendimiento (%) | 89 | 89 | 90 |
Para la alternativa 1 tratando de lograr un buen diseño se han fijado en valores convenientes el largo ideal, el paso polar, y el flujo, lográndose una solicitación magnética normal y la corriente de arranque dentro de un valor en p.u. admisible, se observa además que la carga térmica está dentro de valores normales.
En la alternativa 2 se debe lograr que la máquina sea la misma, para ello se mantienen las dimensiones geométricas y se fuerza el flujo para que el número de conductores activos por fase adoptado se mantenga constante.
Como se observa la solicitación magnética en el entrehierro y dientes disminuye y consecuentemente el factor de saturación. Aumenta ligeramente la caída reactiva como consecuencia del incremento de la reactancia por fase.
Para la alternativa 3 se mantienen las dimensiones geométricas, pero se adopta una tensión de alimentación de 440 V, se reduce la corriente de línea y en consecuencia la de barra y anillos, debiéndose corregir las respectivas densidades para mantener constantes las correspondientes secciones y en consecuencia lograr las dimensiones de las ranuras estatóricas y rotóricas definidas para la alternativa 1.
Se tiene una solicitación magnética (entrehierro y dientes) muy próxima a la de la alternativa 1, observándose además una reducción de la caída inductiva.
Merece destacarse que se han hecho los tres cálculos para un mismo motor variando sus condiciones de funcionamiento.
Comparando las características par (y corriente) en función velocidad de las aplicaciones correspondientes a las alternativas 1 y 2 se observa en la figura 368 que (a tensión constante 380 V) para 60 Hz se reduce el par de arranque y el par máximo.
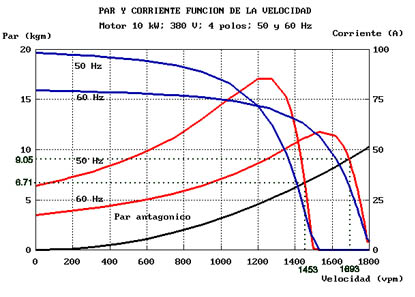
Tomando como referencia el par resistente para la condición de 50 Hz (6.71 kgm; 1453 vpm) y considerando que el mismo crece cuadráticamente con la velocidad, se observa que para 60 Hz el motor debe desarrollar un par 35% superior (9.05 kgm; 1693 vpm obtenidos gráficamente), mientras que el punto de funcionamiento nominal del motor a 60 Hz a potencia constante resulta igual a 83% (5.59 kgm; 1743 vpm).
La potencia resulta:  kW, se sobrecarga un 57%.
kW, se sobrecarga un 57%.
Las pérdidas en el hierro se mantienen prácticamente constantes, y el par aceleratriz es sensiblemente menor y consecuentemente la aceleración será más lenta.
Los cálculos de las alternativas 1 y 3 se han desarrollado fijando además de la misma geometría la misma potencia, a 60 Hz el motor absorbe el 86% de la corriente por lo que puede sobrecargarse un 15%, en otras palabras su potencia resulta P = 1.15´ 10 = 11.5 kW.
Observando las características de par y corriente correspondientes a las alternativas 1 y 3 en la figura 369 se nota menor par de arranque y prácticamente el mismo par máximo, de todos modos también en este caso el motor seleccionado a 50 Hz funcionando a 60 Hz queda sobrecargado un 46% (referencia 11.5 kW).
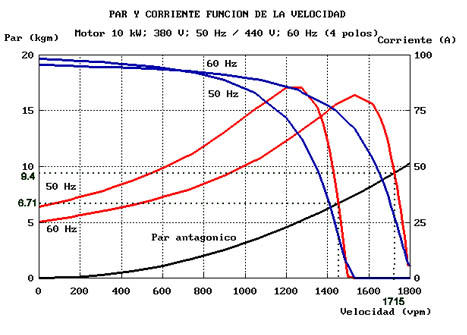
En comparación con el caso anterior se observa mejores condiciones de aceleración.
Al elegir un motor para estas aplicaciones es necesario partir de su utilización a 60 Hz, es decir, tiene que ser un motor para 60 Hz de una potencia aproximada de 17 kW para la tensión adecuada.
Si a 60 Hz se lo alimenta con 440 V y a 50 Hz se lo alimenta con 380 V su potencia a 50 Hz será entonces igual a 14.8 kW, aunque la carga sólo requiere 10 kW. Si en cambio en ambas aplicaciones se lo alimenta con 380 V la potencia a 50 Hz también será 17 kW, requiriéndose sólo 10 kW.
En ambos casos es importante tener bajo control las pérdidas en el hierro.
Por último resulta evidente que considerando sólo el funcionamiento a 50 Hz el motor resulta sensiblemente sobredimensionado, con un par de arranque y aceleratriz seguramente excesivos para la máquina accionada.
Para comparar las características de las distintas aplicaciones del motor, se utilizó un programa «MOTCUR» que levantando de dos corridas de cálculo las características de par y corriente en función de la velocidad y fijando un valor de referencia del par antagónico, dibuja las graficas superpuestas facilitando el análisis.
PROBLEMA: 5.7
Se dispone de un motor asincrónico trifásico con rotor de jaula simple de 30 kW que ha sido bobinado para 440 V y 60 Hz, conexión triángulo y de 4 polos.
Es necesario aprovechar este motor para el mismo tipo de servicio en una red de 50 Hz presentándose como posibles las siguientes tensiones de alimentación: 440 V y 380 V.
Se desea saber como funcionará el motor en cada caso, en particular su potencia de salida, velocidad, par en condiciones de funcionamiento, en el arranque y valor máximo.
Para cada condición de funcionamiento indicar la incidencia en la sobreelevación de temperatura.
PROBLEMA: 5.8
Calcular un motor asincrónico trifásico con rotor de jaula simple de 10 kW, 380 V, 60 Hz, conexión estrella y de 4 polos.
El objetivo del trabajo consiste en describir en forma sintética los razonamientos realizados para calcular el motor especificado.
Para la elección del flujo se emplean los criterios que se detallan en el capítulo 5.15 "Máquina asincrónica" en el parágrafo "Incidencia de la frecuencia en la elección del flujo".
Como el cálculo se realiza con el programa «MOTOCA», es conveniente destacar que además el mismo utiliza para la elección de algunas magnitudes de la máquina, datos obtenidos de la bibliografía que se cita en el capítulo mencionado, quedando a criterio del usuario introducir aquellas modificaciones que considere adecuadas para optimizar el diseño.
Si se dispone de alguna experiencia previa se puede preparar el lote de datos imponiendo además de la potencia, tensión de línea, frecuencia, tipo de conexión, número de polos, factor de potencia y rendimiento los registros que se indican a continuación, dejando los demás registros iguales a cero:
| Paso polar | 115 mm |
| Largo ideal | 160 mm |
| Ranuras por polo y fase | 4 |
| Coeficiente de saturación | 1.4 |
| Vías de corriente internas | 2 |
| Vías de corriente externas | 4 |
| Ranura estator semicerrada trapezoidal fondo semicircular | Tipo 4 |
| Altura del trapecio superior | 2.5 mm |
| Rotor de jaula simple | Tipo 2 |
| Número de ranuras del rotor | 38 |
| Ranura rotor circular | Tipo 5 |
Los resultados de este cálculo se incluyen en la TABLA DE VALORES COMPARATIVOS, y corresponden para la Alternativa 1.
TABLA DE VALORES COMPARATIVOS
| Magnitud | Alternativa 1 | Alternativa 2 | Alternativa 3 |
| Coeficiente de saturación calculado | 1.44 | 1.37 | 1.33 |
| Factor de forma (HK1) | 1.080 | 1.084 | 1.084 |
| Entrehierro (mm) | 0.44 | 0.4 | 0.4 |
| Caída inductiva adoptada (%) | 3 | 3 | 6 |
| F.m.m. diente estator (Av) | 27 | 30 | 32 |
| F.m.m. diente rotor (Av) | 80 | 54 | 44 |
| Conductores activos por fase teóricos | 215.2 | 214.5 | 207.8 |
| Conductores activos por ranura | 13.5 | 13.5 | 13.0 |
| Conductores activos por fase adoptados | 216 | 216 | 208 |
| Flujo (Wb) | 0.00825 | 0.00825 | 0.00825 |
| Flujo corregido (Wb) | 0.00822 | 0.00819 | 0.00824 |
| Inducción en el entrehierro (T) | 0.61 | 0.62 | 0.63 |
| Inducción max/med - BETA | 1.38 | 1.40 | 1.40 |
| Inducción a 1/3 diente estator (T) | 1.29 | 1.30 | 1.32 |
| Inducción a 1/3 diente rotor (T) | 1.66 | 1.59 | 1.56 |
| Corriente de barra (A) | 285 | 285 | 274 |
| Sección de barra (mm²) | 47.5 | 43.8 | 42.2 |
| Densidad de corriente de barra (A/mm²) | 6.0 | 6.5 | 6.5 |
| Diámetro de ranura (mm) | 5.3 | 7.7 | 7.6 |
| Corriente de anillo (A) | 866.4 | 866.4 | 834.3 |
| Sección de anillo (mm²) | 216.8 | 200.0 | 192.7 |
| Densidad de corriente de anillo (A/mm²) | 4.0 | 4.3 | 4.3 |
| Cupla de arranque (p.u.) | 1.18 | 1.18 | 1.31 |
| Corriente de arranque (p.u.) | 6.2 | 6.2 | 6.4 |
| Cupla máxima (p.u.) | 3.1 | 3.1 | 3.2 |
| Resbalamiento (%) | 2.6 | 2.6 | 2.7 |
| Factor de potencia | 0.89 | 0.89 | 0.90 |
| Rendimiento (%) | 90 | 90 | 89.9 |
| Caída inductiva calculada (%) | 6.3 | 6.3 | 5.9 |
De todos los resultados sólo se incluyen los útiles para poder seguir el razonamiento realizado para evaluarlos.
Se observa que el valor del coeficiente de saturación calculado resulta 1.44, es decir un 2.8% superior al adoptado inicialmente.
Esto se justifica observando que si bien el valor de inducción en el entrehierro se encuentra dentro de valores aceptables (límite inferior) y que además el valor de inducción a 1/3 del diente del estator es también bajo, en cambio el valor de la inducción a 1/3 del diente del rotor tiene un valor relativamente alto, lo cual se ve además reflejado en los valores de f.m.m. de los dientes.
Se decide entonces recalcular la máquina reduciendo la inducción en el diente rotórico, esperando obtener un coeficiente de saturación menor, que se adopta igual a 1.35.
Para ello se aumenta la densidad de corriente en la barra de 6 a 6.5 A/mm² con el objeto de reducir su diámetro y tener un diente más amplio, los resultados se observan en la Alternativa 2.
En este caso el coeficiente de saturación calculado resulta 1.37 valor más cercano al adoptado, pero se observa al final que la caída inductiva calculada se aparta notablemente del valor estimado, razón por la cual se deben rehacer los cálculos fijando una caída inductiva del 6%.
En estas condiciones el número de conductores activos por fase se reduce un 3.7%, como además la f.e.m. se redujo un 3%, se incrementa ligeramente el flujo y se observa su incidencia en los valores de inducción, par de arranque y par máximo.
Con la disminución del número de conductores activos por fase se tiene también una disminución de la corriente de barra (3.8%) que se refleja en el diámetro de la ranura, finalmente se tiene que la caída inductiva calculada resulta 5.9% valor que prácticamente coincide con el adoptado.
Se debe destacar que la variación del diámetro de la ranura produce una disminución de la inducción en el diente, y como consecuencia se tiene una reducción del factor de saturación calculado el cual resulta un 5% menor que el adoptado.
Este último incide tanto en el valor del factor de forma (HK1) como del coeficiente beta (relación entre la inducción max/med) que se utiliza para calcular la inducción en el entrehierro.
El lector podrá concebir sin duda otras alternativas que mejoren el proyecto o bien se adecúen a sus posibilidades de fabricación.
Se considera útil si se dispone de la instalación para realizar las barras del rotor mediante el proceso de presofusión en aluminio (el material utilizado para las alternativas antes mencionadas es cobre), adoptar una ranura tipo 7 manteniendo los mismos valores de pérdidas rotóricas, se debe entonces aumentar la sección de la barra y del anillo en la relación de las correspondientes resistividades (0.034/0.021 = 1.62), esto se logra ajustando proporcionalmente las densidades de corriente de barra y anillo utilizadas para la Alternativa 3.
Debido a la forma de la ranura tipo 7 es probable que la dimensión del diente rotórico resulte mayor, lo que permitiría aumentar la inducción en esta parte del circuito para un mejor aprovechamiento del material magnético.
Si el lector realiza este cálculo podrá comprobar que la inducción a 1/3 del diente del rotor efectivamente disminuye a 1.51 T, pero como aumenta la altura del diente la f.m.m. de esta parte del circuito se incrementa, pasando de 44 a 55 (AV), con lo cual el coeficiente de saturación calculado resulta 1.38 que prácticamente coincide con el valor adoptado, esto pone en evidencia que si se aumenta la inducción en el entrehierro (máquina de menor dimensión) aumenta el factor de saturación, apartándose del valor impuesto inicialmente.
Los resultados de esta última alternativa muestran que los valores correspondientes a par de arranque, corriente de arranque, par máximo, resbalamiento, factor de potencia y rendimiento prácticamente no varían.
Hecha esta adopción constructiva todavía queda por recalcular la máquina para verificar que el ajuste de los resultados cumpla con los valores impuestos al iniciarse el cálculo.
PROBLEMA: 5.9
Al variar el estado de carga de un motor varía la corriente que absorbe y el factor de potencia, para un motor de jaula simple de 2,2 kW, 380 V, 50 Hz, 4 polos, cosj (nominal) 0,76 y rendimiento 83%, es de interés graficar esta relación.
PROBLEMA: 5.10
Durante el proceso de seguimiento y control de la reparación de un motor asincrónico con rotor de jaula simple de 1750 HP; 2300 V; 50 Hz; conexión estrella, se efectuó el relevamiento de los datos de chapa y de las magnitudes que se indican a continuación:
- Rendimiento 95.7%
- Factor de potencia 0.927
- Velocidad 1486 vpm
- Ranuras estatóricas 72
- Polos 4
- Largo total del paquete 740 mm
- Canales radiales de ventilación estatóricos 12
- Ancho de los canales 9 mm
- Canales radiales de ventilación rotóricos 12
- Ancho de los canales 9 mm
- Diámetro al entrehierro 506 mm
- Altura de la corona estatórica 72.5 mm
- Ranura estatórica abierta de caras paralelas
- Altura de la ranura 50.5 mm
- Altura de la entrada 3 mm
- Ancho de la ranura 11 mm
- Número de vías externas (NVIAS) de corrientes 4
- Entrehierro 1.4 mm
- Número de ranuras rotóricas 57
- Tipo de ranura semicerrada de caras paralelas
- Altura de la ranura 45 mm
- Altura de la entrada 3.5 mm
- Ancho de la ranura 8 mm
- Ancho de la entrada 2.3 mm
- Longitud de las barras 842 mm
- Material de las barras cobre
- Altura de los anillos 57 mm
- Ancho del los anillos 34 mm
- Material de los anillos cobre
Para la fabricación del devanado se copió el mismo diseño que tenía el diseño anterior, es decir, número de conductores por ranura y sección de la planchuela utilizada como así también las conexiones serie y paralelo de los conductores que forman las fases.
Con todos estos datos se puede verificar el cálculo del motor, al hacerlo se observó los siguiente:
- Los valores de solicitación magnética del entrehierro y de los dientes resultaban algo bajos.
- Las características mecánicas par de arranque a tensión nominal y corriente de arranque no correspondían con los valores de la documentación original del motor.
- Valor de la carga térmica excesivamente alto que pudo haber tenido incidencia en la falla del aislamiento.
Conociendo que el motor ya había sido reparado en otra oportunidad, se puso en duda que el devanado que se estaba copiando era igual al diseño de origen de la máquina.
Se procedió a consultar al fabricante pudiéndose comprobar que el devanado original tenía un número distinto de conductores por ranura (en consecuencia de conductores por fase), siendo esta en principio la causa de las diferencias funcionales observadas.
Esto pone de manifiesto la enorme utilidad que tiene poder verificar por cálculo el comportamiento de una máquina y a pesar de no ser ese el objetivo fundamental efectuar este tipo de controles, pudiendo en consecuencia aconsejar al usuario de la misma acerca de las posibles causas de falla, o poner de manifiesto un uso inadecuado de la máquina.
También en este caso para comparar las características de distintas alternativas de devanados, se utilizó el programa «MOTCUR».
PROBLEMA: 5.11
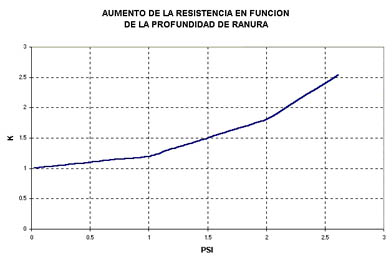
Se propone utilizar el programa de cálculo del motor asincrónico, obteniendo las características de par y corriente en función de la velocidad, y analizar el efecto que la profundidad de ranura tiene en los parámetros del rotor, a fin de integrar con esta documentación un informe.
Con el lote de datos del archivo "procap5.dat" que corresponde a un motor asincrónico de jaula profunda de 15 kW, se prepara el cálculo.
Se ejecuta el programa de la forma habitual, indicando el nombre del archivo de datos correspondiente, luego indicar el nombre del archivo de salida (por ejemplo el mismo nombre con extensión imp) y por último el nombre del archivo para las tablas (por ejemplo con extensión txt), este ultimo archivo es el que debe levantarse con el Excel.
Desde el Excel se llama el archivo, cliquear "Archivo/Abrir" (para encontrarlo seleccionar tipo de archivo *.txt), en el cuadro de diálogo "Abrir", el asistente para importar pregunta tipo de datos, indicar delimitados, en el paso siguiente indicar separador punto y coma, y se importan los datos.
Con los datos en la planilla se definen los valores que se grafican y se observan las características de par y corriente en función de la velocidad figura 371.
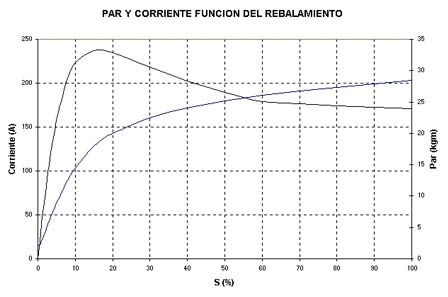
Para el motor asincrónico se debe prestar atención que los valores de par en función del resbalamiento figura 371 están dados en unidad de corriente (A) por lo tanto se los debe multiplicar por la escala de par en kgm/A que se obtiene con la expresión:

Es importante destacar que el cálculo de motores en la bibliografía clásica supone que las reactancias, (permeancias) son constantes. Con esta hipótesis se desarrolló el programa de cálculo de motores asincrónicos ("MOTOCA"), que no tiene en cuenta los efectos de saturación de los circuitos de dispersión durante el transitorio de arranque.
Cuando se realiza el ensayo de rotor bloqueado (cortocircuito) se tiene en consecuencia un valor de corriente de cortocircuito (de arranque) superior al obtenido por los cálculos, afectando las características de arranque para valores altos del resbalamiento. Este efecto debe ser tenido en cuenta para evaluar las condiciones de funcionamiento reales de un motor.
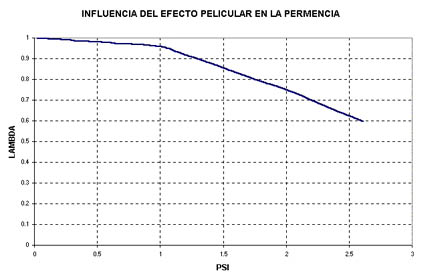
En particular para un motor asincrónico de jaula profunda, se pueden graficar aquellos parámetros de diseño que tienen incidencia, durante el proceso de arranque, en los parámetros del rotor.
La figura 372 muestra el efecto que la profundidad de ranura tiene en el cálculo de la permeancia de ranura, la figura 373 el efecto que tiene en la resistencia de las barras, vale aclarar que como el número de barras por ranura es igual a 1 la profundidad de ranura resulta igual a PSI.
PROBLEMA: 5.12
Se quiere analizar la incidencia del entrehierro en las características de par y corriente en función del resbalamiento, y además observar para la condición de arranque el comportamiento de estas variables.
Para encarar el estudio se utilizó el programa para calcular un motor asincrónico normal de jaula simple de 10 kW; 380 V; 50 Hz; conexión estrella; 4 polos; cos j 0,88 y redimiento 86%.
Con los resultados de la primera corrida se optimizó el proyecto haciendo para ello adecuados ajustes del paso polar, largo ideal y del flujo, considerando el valor del entrehierro elegido por el programa igual a 0.4 mm como valor de referencia.
Para el rotor se adoptó una ranura semicerrada (tipo 7) utilizando aluminio tanto para las barras como para los anillos. Se fijó un valor adecuado de densidad de corriente en las barras para que el resbalamiento calculado (que resulta del 2.7%) se encuentre dentro de valores aceptables para un motor de estas características.
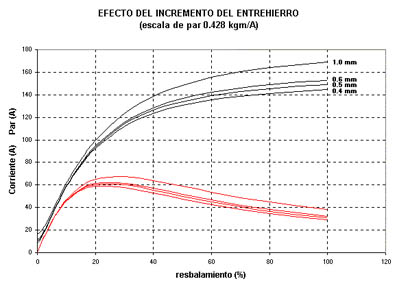
Manteniendo constantes las dimensiones del motor y el valor del flujo se realizaron nuevas corridas incrementando en cada caso el valor del entrehierro imponiendo los siguientes valores: 0.5 mm, 0.6 mm y 1.0 mm.
Es importante destacar que la variación del entrehierro incide en el factor del saturación y de la caída inductiva por lo cual, para que los resultados de las alternativas estudiadas sean comparables, se debe controlar en cada caso, que estos valores adoptados al inicio del cálculo se correspondan con los finalmente calculados.
Se recuerda que también el factor de saturación y el entrehierro afectan la dispersión armónica del entrehierro tanto del devanado estatórico como el rotórico, que como se sabe tiene incidencia en las características del motor.
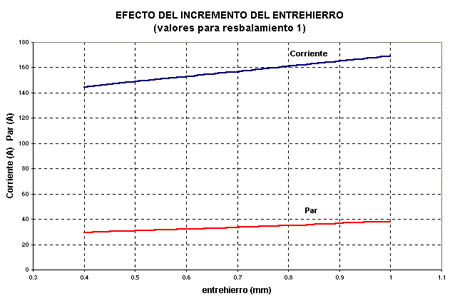
La figura 374 muestra el efecto de variación del entrehierro en las características de corriente y par del motor, la figura 375 muestra el efecto en la corriente y par de arranque.
Finalmente se observa que para las alternativas consideradas, el resbalamiento se mantiene prácticamente constante, y que con el incremento del entrehierro disminuye notablemente el factor de potencia pasando de 0.85 a 0.69 y el rendimiento se reduce de 89.8% a 88.1%.
PROBLEMA: 5.13
La forma más simple de arrancar un motor de jaula es conectando el devanado estatórico directamente a la red, en estas condiciones dependiendo de la potencia del motor, la corriente de arranque puede resultar muy alta y presentar ciertos inconvenientes para la red de alimentación, afectando la tensión de alimentación de las cargas fuera de los niveles de tolerancia (calidad de servicio).
Veamos algunas consideraciones de uno de los métodos de arranque utilizados denominado estrella - triángulo.
El primer paso consiste en considerar si el par desarrollado por el motor es suficiente para esta aplicación, se debe tener en cuenta que el par desarrollado por el motor es sólo 1/3 del par cuando el arranque es directo.
El par resistente no debe exceder el par motor en cuyo caso no arrancará, ni debe ser tan elevado como para que la corriente en el momento de la conmutación a D sea excesivamente alta.
Si la conmutación se realiza cuando el par motor alcanza su valor máximo, la corriente puede ser del orden del 50 a 80% del valor de la corriente que tomaría en arranque directo. El objetivo de este método consiste en tratar de alcanzar la máxima velocidad posible con conexión en Y.
Debido a que el tiempo de arranque se incrementa en proporción con la reducción del par acelerador, en estas condiciones el tiempo de arranque puede resultar considerablemente mayor.
Si este tiempo es mayor que el permitido, el calor desarrollado en el motor, reduce la vida útil de su aislamiento y en casos extremos puede provocar la falla del mismo.
Este tipo de arranque comúnmente es desaconsejable para motores que accionan bombas, ventiladores u otras máquinas cuyo par resistente crece con el cuadrado de la velocidad. Esto resulta particularmente cierto para motores de alta velocidad (2 polos), cuya característica de par en función de la velocidad, presenta para estas aplicaciones un pequeño par acelerador.
Resulta particularmente interesante analizar como varía la corriente en la conmutación.
Con un arranque estrella - triángulo es inusual alcanzar durante la conexión Y una velocidad mayor del 70 a 90% de la velocidad nominal del motor.
Durante el proceso de conmutación el motor tiende a atrasar, para minimizar el valor de la corriente en el momento de la conexión D la operación de conmutación se dispone de modo que la tensión de línea atrase 30 grados.
Esto significa que la conexión estrella - triángulo debe ser realizada de diferente modo según el sentido de rotación del motor.
Veamos como ejemplo un motor cuyo devanado es para 380 V D y que se conecta inicialmente en Y.
En la figura 376 se muestra el principio de funcionamiento de este tipo de arrancadores y la posición de los contactos con conexión Y y D.
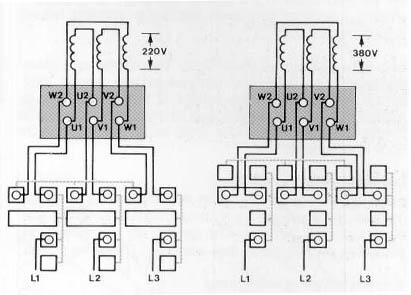
Se indican además las conexiones que se deben realizar cuando se lo conecta en D en función del sentido de rotación:
- En sentido del reloj: U1-U2, V1-W2, W1-U2
- En sentido contrario: U1-W2, V1-U2, W1-V2
Sobre este tema se sugiere una lectura de interés en Libros interactivos - Guía de uso de programas aplicables en ingeniería electricista - TRANSITORIO DE ARRANQUE, accesible en la dirección www.ing.unlp.edu.ar/sispot/ dentro de la bibliografía disponible en ese sitio.
PROBLEMA: 5.14
Como consecuencia de una falla grave del devanado estatórico de un motor asincrónico con rotor de jaula simple de 75 HP (55 kW); 380 V; 50 Hz; conexión estrella, durante el proceso de reparación se efectuó el relevamiento de los datos y de las magnitudes que se indican a continuación:
- Rendimiento 88 %
- Factor de potencia 0.86
- Polos 2
- Ranuras estatóricas 36
- Largo total del paquete 260 mm
- Diámetro al entrehierro 300 mm
- Altura de la corona estatórica 46 mm
- Ranura estatórica semicerrada tipo 4
- Profundidad de la ranura 30 mm (H6)
- Altura de la entrada 4 mm (H4)
- Altura del trapecio superior 0.2 mm (H3)
- Ancho de la ranura en la entrada 6.5 mm (B2)
- Ancho de la ranura en el entrehierro 11 mm (B1)
- Ancho de la ranura en el fondo 14 mm (B5)
- Número de vías internas de corriente 5 (NVIN)
- Número de vías externas de corriente 2 circuitos en paralelo (NVIAS)
- Entrehierro 1.3 mm
- Número de ranuras rotóricas 28
- Tipo de ranura semicerrada de caras paralelas tipo 2
- Profundidad de la ranura 24 mm (H6)
- Altura de la entrada 0.5 mm (H4)
- Altura del trapecio superior 0.3 mm (H3)
- Ancho de la ranura en el entrehierro 5.5 mm (B1)
- Ancho de la entrada 3 mm (B2)
- Relación ancho/profundidad de la barra 0.23
- Longitud de las barras 290 mm
- Sección de la barra 117 mm²
- Material de las barras cobre
- Altura de los anillos 32mm
- Ancho del los anillos 27.7 mm
- Material de los anillos cobre
Como el motor ya había sido reparado en otra oportunidad, se puso en duda que el devanado que se estaba copiando era igual al diseño de origen de la máquina, además el rotor había sido torneado llevando el entrehierro original (no conocido) a un valor de 1.3 mm.
Se procedió a verificar como estaba realizado el bobinado que se debía reemplazar, siendo el número de conductores presentes en media ranura igual a 50, realizado con 5 conductores en paralelo de 1.15 mm de diámetro y con 2 circuitos externos en paralelo.
Con estos datos de determinó el valor de densidad de corriente 6.11 A/mm², observando que es un poco alto, y se decidió realizarlo con 8 conductores en paralelo, adoptando una densidad de corriente de 4.5 A/mm² resultando un diámetro del conductor de 1.06 mm (se debe finalmente adoptar la dimensión normalizada más próxima).
Se realizó el cálculo de verificación fijando todas las dimensiones conocidas, el rotor se representó como una jaula profunda utilizando una ranura tipo 2 fijando una relación ancho/profundidad de la barra igual a 0.23.
Como el entrehierro había sido modificado se consideró conveniente estudiar una segunda alternativa, manteniendo constante el devanado (número de conductores), para determinar cual sería el entrehierro de un motor de estas características obteniéndose un valor de 0.9 mm.
En la figura 377 se comparan ambas alternativas y se observa la incidencia del entrehierro en la corriente total, par máximo y de arranque, que se incrementan con el aumento del entrehierro, también aumenta la corriente de excitación un 19 % con una variación del entrehierro del 44 %.
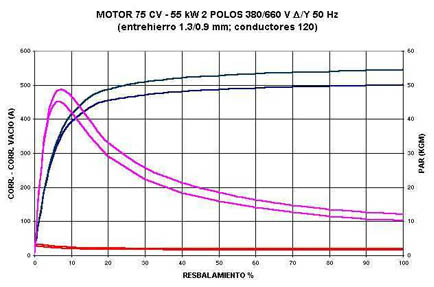
También se hace notar que si bien el cálculo se realiza para un motor de jaula profunda, las características que resultan son las correspondientes a una jaula simple, debido a que la relación entre el ancho de la barra y su altura es moderada.
PROBLEMA: 5.15
Una especificación que tiene fundamental importancia cuando se define la potencia de un motor o se tiene que reemplazar un motor por otro es el denominado factor de servicio (FS).
Es bastante común que el fabricante original de un equipo utilice el motor a su máxima capacidad de carga. Por esta razón, no se debe cambiar un motor con uno que tiene la misma potencia indicada en la chapa pero con un factor ser servicio menor, es decir con una capacidad de carga menor.
En la norma NEMA Standards Publication Nº MG1-1998 "MOTORS AND GENERATORS", se define el factor de servicio de un motor de corriente alterna como un coeficiente que multiplicado por la potencia nominal, indica la carga admisible (por encima de la nominal) que puede entregar con las condiciones especificadas para ese factor de servicio. Algunos motores pueden tener factores de servicio más altos que los indicados por la norma NEMA.
El factor de servicio de un motor no debe ser confundido con la capacidad de sobrecarga momentánea que durante algunos minutos puede soportar un motor. El factor de servicio FS = 1 significa que el motor no fue proyectado para funcionar continuamente por encima de su potencia nominal.
Es una medida de la capacidad de sobrecarga continua de un motor con la cual puede funcionar sin sobrecargas o daños, con tal que los otros parámetros de diseño como la tensión nominal, frecuencia y temperatura ambiente se encuentren dentro de los valores normales. Por ejemplo un motor de 3/4 HP con un FS = 1.15 puede funcionar a 0.86 HP (0.75 HP ´ 1.15 = 0.862 HP) sin sobrecalentamiento u otros daños para el motor, si está alimentado con la tensión y frecuencia indicada en la chapa de características.
Para motores de corriente alterna de mediana potencia funcionando a su potencia nominal alimentados con la tensión y frecuencia nominales, la corriente que toma de la red no debe superar el 10% de su corriente nominal.
Para las condiciones normales de servicio establecidas en la norma (temperatura ambiente comprendida entre -30 a 40 °C y altitud sobre el nivel del mar que no exceda los 1000 m) un motor de corriente alterna para usos generales debe ser capaz de funcionar a su potencia nominal en servicio continuo.
Cuando un motor funciona con un factor de servicio mayor que 1, su rendimiento, factor de potencia y velocidad son distintos a los que tendría funcionando a potencia nominal, pero no pueden variar el par y corriente de arranque, y el par máximo.
Cuando un motor funciona en forma continua con un factor de servicio mayor que 1, tendrá una vida útil reducida si se la compara con su funcionamiento con carga nominal.
La vida de sus aislamientos y de sus cojinetes se reducen con el factor de servicio.
PROBLEMA: 5.16
Como ya visto las pérdidas Joule deben ser referidas a determinadas temperaturas según la clase de aislamiento de la máquina que se desea calcular, y el límite de temperatura depende del tipo de material empleado.
La temperatura del punto más caliente del bobinado se debe mantener por debajo del límite de la clase adoptada, para no reducir la vida útil del aislamiento. Las normas establecen un máximo para la temperatura ambiente y especifican una elevación de temperatura máxima para cada clase de aislamiento. De este modo queda indirectamente limitada la temperatura del punto más caliente.
La norma IEC 60034-1 en la siguiente tabla establece en función de la clase de aislamiento las temperaturas admisibles.
| Clase de aislación | Tambiente ºC | DT (resistencia) ºC | Tmedia ºC | Tpunto caliente ºC |
| A | 40 | 60 | 100 | 105 |
| E | 40 | 75 | 115 | 120 |
| B | 40 | 80 | 120 | 130 |
| F | 40 | 100 | 140 | 155 |
| H | 40 | 125 | 165 | 180 |
La norma NEMA Nº MG1-2003 en función del factor de servicio en la siguiente tabla establece las temperaturas admisibles para motores medianos de inducción, también se indican valores para otros tipos de máquinas.
| Clase de aislación | Tambiente ºC | Tmedia ºC | |
| FS = 1 | FS = 1.15 | ||
| F | 40 | 105 | 115 |
| H | 40 | 125 | --- |
Para motores de construcción naval se deberán adoptar los valores que establecen las distintas entidades clasificadoras, por ejemplo Bureau Véritas, Lloyds Register of Shipping, etc.
Es importante destacar que los programas de cálculo desarrollados ("SINCRO", "MOTOCA", "MAQCON") utilizan para la determinación de las resistencias el valor de resistividad RHO (por defecto se adopta cobre) referido a la temperatura de 75 ºC, razón por la cual a los efectos de los valores garantizados, en función de la clase de aislamiento de la máquina que se desea calcular, se deberá ajustar la resistividad del material adoptado mediante un coeficiente de corrección al valor correspondiente a la temperatura media de la clase.

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML