



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
CAPITULO 3 - EL ALTERNADOR DE POLOS SALIENTES
3.1 DEFINICION
El alternador es una máquina sincrónica que funciona como generador, en el se inducen fuerzas electromotrices de frecuencia proporcional a la velocidad, obteniéndose tensiones y corrientes alternas.
Concretamos ahora nuestro estudio sobre el alternador, aunque muchos conceptos que examinamos serán aplicables también a los motores de corriente alterna en general tanto sincrónicos como asincrónicos.
Las condiciones normales de servicio ya han sido examinadas en el capítulo dedicado a las máquinas rotantes, y a continuación agregaremos algunos comentarios particulares que corresponden específicamente al alternador.
Es importante destacar que en las notas que siguen se incluyen recomendaciones de las normas que son válidas (como ellas mismas dicen) salvo que se especifique lo contrario.
Aún así es conveniente evitar especificaciones particulares que se apartan de las normas en forma tal que conducen a proyectos especiales, no necesariamente mas confiables, siendo preferible en general adquirir máquinas normalizadas y cuando se presentan condiciones que se apartan de las normas utilizarlas con prestaciones reducidas para tener en cuenta la situación.
3.2 CARACTERISTICAS NOMINALES
3.2.1 Potencia nominal
Para un generador sincrónico es la potencia eléctrica aparente expresada en VA, complementada con el factor de potencia.
Es válido el criterio de las normas que fijan el factor de potencia para los generadores sincrónicos sobreexcitados en 0.8, lógicamente es importante cuando se especifica la máquina asegurarse de que en funcionamiento normal esta situación es representativa.
3.2.2 Tensión y frecuencia nominales
Son respectivamente la tensión y frecuencia normales en los bornes de línea de la máquina.
Los alternadores deben poder suministrar su potencia aparente (kVA) en bornes, con el factor de potencia nominal cuando el mismo puede ser controlado separadamente, para distintos valores de la tensión y frecuencia que pueden apartarse de sus valores nominales según muestra la Figura 129.
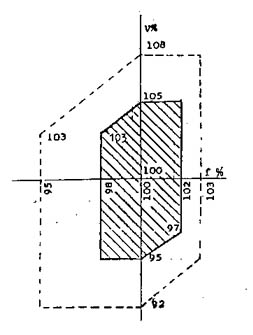
Cuando las máquinas funcionan dentro de la zona sombreada deberán ser capaces de entregar en forma permanente, su potencia nominal, pero sin respetar algunas de las restantes garantías (que son aplicables a tensión y frecuencia nominales).
Cuando las máquinas funcionan sobre el límite de la zona sombreada se puede aceptar un incremento de 10 grados C° en los límites de sobreelevación de temperatura que las normas fijan para condiciones normales.
Cuando las máquinas funcionan dentro de la zona delimitada por la línea punteada (y fuera de la zona sombreada), deben ser capaces de entregar la potencia nominal, pero generalmente presentarán una sobreelevación de temperatura muy superior a los límites que fijan las normas.
En consecuencia no es conveniente un funcionamiento prolongado fuera de la zona sombreada indicada en la figura, y si esta condición de operación se presenta frecuentemente, será conveniente reducir la carga de la máquina (o al momento de especificarla incrementar su potencia nominal) a fin de que trabajando aliviada desde el punto de vista de los efectos térmicos no se vea afectada su vida útil.
Si una máquina está diseñada para funcionar a más de un valor de tensión nominal, o bien si la tensión nominal puede variar dentro de un cierto rango, los límites de sobreelevación de temperatura establecidos por las normas, se deberán aplicar para todos los valores de tensión.
3.3 FORMA DE ONDA DE LA TENSION
3.3.1 Condiciones eléctricas
Se supone que el circuito al cual el alternador se conecta no es deformante y es prácticamente simétrico como se define a continuación.
a) Un circuito puede ser considerado prácticamente como no deformante si, cuando se lo alimenta con una tensión sinusoidal, la corriente es prácticamente sinusoidal, es decir, para la misma fase ninguno de los valores instantáneos difiere del valor instantáneo de la onda fundamental en más del 5% de la amplitud de este último.
b) Un circuito polifásico se lo considera como prácticamente simétrico si, alimentado por un sistema de tensiones simétrico, está recorrido por un sistema de corrientes prácticamente simétrico, es decir, donde ni la componente inversa, ni la homopolar superan el 5% de la componente directa.
La situación que se presenta cuando se alcanzan los límites definidos en a) y b) simultáneamente con la carga nominal, no debe conducir a temperaturas perjudiciales en el alternador (en esta condición es conveniente que las sobreelevaciones de temperatura no excedan en 10 ° C los valores establecidos por las normas).
3.4 CARACTERISTICAS DE LA AISLACION
3.4.1 Ensayos dieléctricos
Estas pruebas se realizan en las instalaciones del fabricante sobre una máquina nueva y terminada, con todas sus partes ubicadas en condiciones equivalentes a las condiciones normales de funcionamiento.
La tensión de ensayo se debe aplicar entre los arrollamientos sometidos al ensayo y la carcaza de la máquina, a la cual se conectan los circuitos magnéticos y los arrollamientos no sometidos al ensayo.
Cuando se efectúa un ensayo de calentamiento, las pruebas dieléctricas deben ser realizadas inmediatamente después.
En el caso de máquinas polifásicas con tensión nominal superior a 1 kV, donde los dos extremos de cada fase son accesibles individualmente, la tensión de ensayo se deberá aplicar entre cada fase y la carcaza, a la cual se conectan el circuito magnético y los arrollamientos de otras fases no ensayados.
La tensión de ensayo debe ser a frecuencia industrial y de forma prácticamente sinusoidal.
El ensayo debe comenzar con una tensión no superior a la mitad de la tensión de ensayo. La tensión se debe aumentar hasta el pleno valor, de un modo progresivo o bien por escalones que no superen el 5% del valor de la tensión plena y el tiempo para alcanzar este valor no debe ser inferior a 10 s.
La plena tensión de ensayo se mantiene durante 1 min de acuerdo con los valores especificados por las normas.
El ensayo a plena tensión realizado sobre los devanados durante la recepción no debe ser repetido. Si se considera necesario repetirlo (a pedido del comprador), después de un nuevo secado de la máquina, la tensión de ensayo debe ser igual al 80% de la tensión plena.
En el caso de rebobinado parcial de arrollamientos cuando entre cliente y reparador se conviene efectuar ensayos dieléctricos es recomendable proceder de la siguiente manera:
a) los arrollamientos parcialmente rebobinados son ensayados a 75% de la tensión prevista para una máquina nueva. Antes del ensayo se deben limpiar y secar las partes originales de los arrollamientos.
b) las máquinas revisadas son sometidas, después del limpiado y secado, a un ensayo con tensión igual a 1.5 veces la tensión nominal, con un mínimo de 1000 V si la tensión nominal es igual o mayor a 100 V y un mínimo de 500 V si la tensión nominal es inferior a 100 V.
3.5 VALORES PARA ENSAYOS DIELECTRICOS
En la Tabla 3.1 se indica la tensión de ensayo que corresponde a los distintos arrollamientos según condiciones de diseño de la máquina.
Tabla 3.1
| PARTE DE LA MAQUINA | TENSION DE ENSAYO (VALOR EFICAZ) |
|
Arrollamientos aislados potencia inferior a 1 kW o 1 kVA y tensión nominal U menor de 100 V potencia inferior a 10000 kW o (kVA) potencia 10000 kW (o kVA) o mayor y tensión hasta 24000 V Arrollamientos de excitación: tensión de excitación £ 500 V tensión > 500 V |
500 V + 2´ U 1000 V + 2´ U 1000 V + 2´ U con un mínimo de 1500 V Diez veces la tensión nominal de excitación con un mínimo de 1500 V 4000 V + dos veces la tensión nominal de excitación |
3.6 COMENTARIOS REFERENTES A LOS ENSAYOS DIELECTRICOS
La tendencia actual de la normativa internacional en lo referente a la coordinación del aislamiento es la de especificar las prescripciones generales de aislamiento fase-tierra de los equipos utilizados en los sistemas trifásicos de corriente alterna.
En consecuencia cada Comité de Aparatos es responsable de especificar los niveles de aislación y el procedimiento de los ensayos para sus equipos.
Las normas fijan criterios acerca de los niveles de tensión a impulso entre fase y tierra que deben soportar las máquinas rotantes de corriente alterna para tensiones que van de 3 a 15 kV inclusive y con bobinas estatóricas preformadas.
Estos ensayos tienen por finalidad evaluar el diseño, la calidad de los materiales que constituyen el aislamiento de las bobinas, así como también su proceso de elaboración, antes de que sean montadas en la máquina.
El valor de pico de la tensión de impulso que se debe aplicar se determina mediante la siguiente relación debiendo redondearse los valores obtenidos al más próximo:

- Up: valor de pico de la tensión que se debe aplicar en kV
- Un: valor nominal de la tensión de servicio en kV
La forma de onda que se debe aplicar es la normalizada para tensiones de impulso con un tiempo de frente (hasta alcanzar el valor de pico) de 1.2 microsegundos, y un tiempo de cola (hemivalor del pico) de 50 microsegundos.
Los niveles de tensión de ensayo que se obtienen aplicando este criterio se juzgan apropiados considerando por un lado las características promedio de las máquinas, y por otro que las máquinas funcionan generalmente en condiciones normales.
Estos niveles de tensiones de ensayo pueden no resultar adecuados en aquellos casos en que las máquinas funcionan en condiciones especiales (máquinas conectadas directamente a líneas aéreas) o en circunstancias anormales (reencendido de interruptores).
En estos casos los arrollamientos deberán estar diseñados para soportar niveles de impulso superiores, o deberán estar protegidos adecuadamente, y a veces deben ser necesarias ambas acciones.
Las normas indican los distintos ensayos y procedimientos que se deben aplicar para probar tanto la aislación entre espiras como así también la aislación principal (contra masa).
3.7 OTRAS CARACTERISTICAS
3.7.1 Sobreintensidad ocasional de los alternadores
Los alternadores con potencia nominal inferior o igual a 1200 MVA deben ser capaces de soportar una corriente igual a 1.5 veces la corriente nominal durante por lo menos 30 s.
Los alternadores con potencia nominal superior a 1200 MVA deben ser capaces de soportar una corriente igual a 1.5 veces la corriente nominal durante un tiempo que será objeto de acuerdo entre constructor y cliente, pero que no será inferior a 15 s.
3.7.2 Desequilibrio de corriente de las máquinas sincrónicas
Las máquinas sincrónicas trifásicas deben ser capaces de funcionar en forma permanente sobre una red asimétrica de modo tal que, ninguna de las corrientes de las fases exceda la corriente nominal.
Además las normas establecen (ver Tabla 3.2 para máquinas de polos salientes) los valores que no deben superarse de la relación de la componente inversa del sistema de corrientes (I2) a la corriente nominal (In) y los valores del producto (I2/In)2 por el tiempo en segundos (t) que se pueden admitir para un funcionamiento en condiciones de falla.
TABLA 3.2
| TIPO DE MAQUINA | Máximo I2/In permanente |
Máximo t´ (I2/In)2 falla |
| Máquina a polos salientes: refrigeración indirecta refrigeración directa |
0.08 0.05 |
20 15 |
3.8 CORRIENTE DE CORTOCIRCUITO
El valor de pico de la corriente de cortocircuito, en el caso de un cortocircuito trifásico en funcionamiento a tensión nominal, no debe superar 21 veces el valor eficaz de la corriente nominal.
Esta condición en alguna medida fija un valor mínimo (12 %) de la reactancia subtransitoria.
3.9 SOBREVELOCIDAD
Todos los alternadores deben ser capaces de soportar al menos una sobrevelocidad igual a 1.2 veces la velocidad nominal por un tiempo de 2 minutos.
Los alternadores accionados mediante turbinas hidráulicas (como también las máquinas auxiliares de cualquier tipo que se encuentran en el mismo eje) deben soportar la velocidad de embalamiento del grupo, pero al menos 1.2 veces la velocidad nominal.
El ensayo de sobrevelocidad se lo considera satisfactorio si, al final del mismo, no se observa ninguna deformación permanente anormal ni otros signos de falla que impidan a la máquina su funcionamiento normal y además si los arrollamientos rotóricos satisfacen después de esta prueba los ensayos dieléctricos.
3.10 PERDIDAS
La determinación de las pérdidas totales se obtiene como suma de las siguientes pérdidas, que se garantizan por separado.
3.10.1 Pérdidas constantes
a) Pérdidas en el hierro (paquete magnético) y pérdidas adicionales en otras partes metálicas.
b) Pérdidas por rozamiento (cojinetes y escobillas). Las pérdidas en los cojinetes comunes deben ser indicadas separadamente aunque los mismos se suministren con la máquina.
c) Pérdidas por ventilación que incluyen la potencia absorbida por los ventiladores, y eventualmente las máquinas auxiliares que forman parte integral de la máquina.
3.10.2 Pérdidas en carga
a) Pérdidas joule en los devanados del inducido.
b) Pérdidas joule en los devanados de arranque o amortiguadores de las máquinas trifásicas. Debe notarse que las pérdidas en los devanados amortiguadores son particularmente significativas solamente en máquinas monofásicas.
Las pérdidas Joule deben ser referidas a determinadas temperaturas según sea la clase de aislación.
La temperatura de referencia de las pérdidas que las normas fijan puede coincidir o no, con la temperatura que corresponde al límite de sobreelevación (también de norma) de cada clase de aislamiento.
Las temperaturas de referencia para las distintas clases de aislamiento son:
| CLASE | TEMPERATURA (ºC) |
| A, E y B F y H |
75 115 |
3.10.3 Pérdidas adicionales debidas a la carga
a) Son las pérdidas que se producen en carga tanto en el paquete magnético, como en otras partes metálicas de la máquina.
b) Pérdidas por corrientes parásitas en los conductores de los devanados del inducido.
3.10.4 Pérdidas en los circuitos de excitación
a) Pérdidas joule en los devanados y en los reóstatos de excitación.
b) Pérdidas totales de la excitatriz mecánica conducida por el eje principal cuando forma parte de la unidad completa, y que se utiliza solamente para excitar la máquina, conjuntamente con las pérdidas en los reóstatos del circuito de excitación, pero con excepción de las pérdidas de rozamiento y ventilación.
Se deben incluir también las pérdidas en los rectificadores de los sistemas de excitación sin escobillas ("brushless"), en los engranajes, correas o transmisiones similares entre el eje de la máquina y la excitatriz.
Se deben tener en cuenta todas las pérdidas en cualquier aparato que se utilice para la autoexcitación y regulación y que esté conectado a los terminales de la máquina sincrónica.
3.10.5 Pérdidas de excitación
Las pérdidas de excitación se calculan con la expresión I2´ R, teniéndose en cuenta que la resistencia del devanado de excitación corresponde al valor corregido a la temperatura de referencia, y la corriente de excitación corresponde a la condición nominal de funcionamiento, medida directamente durante el ensayo en carga.
En casos en que no es posible la realización del ensayo en carga el método de determinación de la corriente que se utiliza para evaluar las pérdidas debe ser acordado entre el fabricante y el comprador.
3.10.6 Pérdidas en las escobillas
Se determinan como el producto de la corriente de excitación nominal por la caída de tensión en escobillas. La caída de tensión admitida para todas las escobillas de cada polaridad será:
- Escobillas de carbón o grafíticas 1.0 V
- Escobillas metalgrafíticas 0.3 V
es decir una caída total de 2.0 V para las de carbón o grafíticas, y 0.6 para las metalgrafíticas.
3.11 METODOS DE ENSAYOS PARA LA DETERMINACION DE LAS PERDIDAS Y DEL RENDIMIENTO
Los ensayos se deben realizar en la máquina nueva con todos los elementos necesarios para su servicio normal, con todos los dispositivos de regulación automática de tensión.
Los instrumentos de medición y sus accesorios, tales como transformadores de medición, shunts y puentes utilizados durante los ensayos, deben ser al menos de clase 1.0. Los instrumentos utilizados para la medición de las resistencias en corriente continua deber ser al menos de clase 0.5.
La determinación del rendimiento de una máquina sincrónica puede ser realizada utilizando un método directo o uno indirecto.
El método directo requiere la medición simultánea de la potencia entregada y de la potencia absorbida, y se puede aplicar en aquellos casos en que la diferencia de potencia alcanza un valor considerable, de modo tal que los errores de medida puedan considerarse despreciables respecto al valor de las pérdidas medidas.
En máquinas medianas y grandes se prefiere recurrir al método indirecto, que consiste en la determinación del rendimiento convencional, mediante la medición separada de las distintas pérdidas presentes en la máquina.
En tal sentido las normas proponen distintos métodos y en el caso de que se puedan utilizar métodos alternativos para un determinado tipo de máquina, se indican cuales son aquellos preferibles.
Se debe tener en cuenta que el proyectista evalúa las pérdidas y el rendimiento mediante cálculos que no siempre tienen en cuenta la totalidad de las pérdidas que se manifiestan en la máquina en las condiciones normales de funcionamiento.
Son los ensayos los que en definitiva determinan el grado de apartamiento entre los valores calculados y los medidos y que como se sabe son motivo de las garantías.
Por ello cuando el rendimiento o las pérdidas totales se obtienen mediante la medición de la potencia de entrada y de salida, una inexactitud en estas mediciones se traduce en un error directo del rendimiento (mediciones de potencia con una exactitud no mayor del 1%, pueden dar un error de la determinación del rendimiento o de las pérdidas del 2%).
3.12 SISTEMAS DE EXCITACION
Tienen la función de suministrar la corriente de campo de la máquina, y comprenden todos los elementos de control y de regulación, como así también los dispositivos de protección.
Según como estén realizados estos sistemas se clasifican en la forma que a continuación se indica:
3.12.1 Excitatriz rotante
Máquina rotante que recibe la potencia mecánica por el eje. Normalmente la excitatriz se encuentra montada en el mismo eje de la máquina sincrónica. En algunos casos la excitatriz está impulsada por otra máquina.
3.12.1.1 Excitatriz de corriente continua
Excitatriz rotativa que utiliza un colector y escobillas para suministrar corriente continua.
3.12.2 Excitatriz de corriente alterna
Excitatriz rotativa que utiliza rectificadores para suministrar corriente continua. Los rectificadores pueden ser controlados o no.
3.12.2.1 Excitatriz de corriente alterna con rectificadores estáticos
Es aquella en la cual la salida de los rectificadores se conecta a las escobillas de anillos rozantes del arrollamiento de campo de la máquina sincrónica.
3.12.2.2 Excitatriz de corriente alterna con rectificadores giratorios (sin escobillas, "brushless")
Es aquella en la cual los rectificadores giran con el eje común de la excitatriz y de la máquina sincrónica, la salida de los rectificadores se conecta directamente, sin anillos ni escobillas, al arrollamiento de campo de la máquina sincrónica.
3.12.3 Excitatriz estática
Excitatriz que suministra su potencia a través de una o más fuentes eléctricas estáticas, utilizando para ello rectificadores fijos para suministrar la corriente continua.
3.12.3.1 Excitatriz estática a fuente de tensión
Es aquella que recibe su potencia únicamente de una fuente de tensión (que pueden ser los terminales de la máquina sincrónica) y utiliza rectificadores controlados.
3.12.3.2 Excitatriz estática compuesta
Es aquella que recibe su potencia de la combinación de una fuente de corriente y una de tensión (dependiendo de las magnitudes en bornes de la máquina sincrónica).
La adición de los aportes puede ser realizada indistintamente por la fuente de corriente alterna o la de continua de los rectificadores, y puede efectuarse en paralelo o en serie. Los rectificadores pueden ser controlados o no dependiendo ello del diseño adoptado.
3.13 TOLERANCIAS DE LAS CARACTERISTICAS NOMINALES
En la Tabla 3.3 se indican las tolerancias fijadas por las normas que corresponden para cada una de las magnitudes de las características nominales que son objeto de garantías por parte del fabricante y que se comprueban durante la recepción de la máquina.
TABLA 3.3
| MAGNITUD | TOLERANCIA |
| Rendimiento determinado por suma de pérdidas: máquinas de potencia £ a 50 kW máquinas de potencia > a 50 kW Pérdidas totales: máquinas de potencia > 50 kW Valor de pico de la corriente de cortocircuito de un alternador en las condiciones especificadas: Corriente de cortocircuito permanente de un alternador para una excitación especificada: Momento de inercia |
- 15% de (1 - rendimiento) - 10% de (1 - rendimiento) + 10% de las pérdidas totales ± 30% del valor garantizado ± 15% del valor garantizado ± 10% del valor garantizado |
1.14 IRREGULARIDADES DE LA FORMA DE ONDA
3.14.1 Prescripciones de ensayo
Estas prescripciones se aplican solamente a máquinas sincrónicas de potencia igual o superior a 300 kW (o kVA) destinadas a ser conectadas a sistemas que funcionan a frecuencias nominales de 16 2/3 Hz a 100 Hz inclusive con el fin de reducir a un mínimo las interferencias entre líneas de transporte y los circuitos adyacentes.
El grado de deformación de la onda de tensión de un generador, respecto a una onda sinusoidal, se puede determinar experimentalmente y para ello se requiere un instrumento adecuado (analizador de armónicas) que permita medir el valor eficaz de las armónicas.
La gama de frecuencias de medida debe cubrir todas las armónicas desde la frecuencia nominal hasta 5000 Hz inclusive.
La prueba se realiza con la máquina funcionando en vacío a la velocidad y tensión nominales.
Con los valores eficaces obtenidos de cada una de las armónicas se calcula el factor armónico telefónico (FAT) de la tensión con la siguiente fórmula:

- En: valor eficaz de la armónica de rango "n" de la tensión entre bornes delínea.
- U: valor eficaz de la tensión entre bornes de línea.
- lambdan: factor de ponderación para la frecuencia correspondiente a la armónica de rango "n".
Los valores numéricos del factor de ponderación para las diferentes frecuencia están indicados en la Figura 131.

Por último digamos que el factor armónico telefónico (FAT) de la tensión entre bornes de línea medida conforme a los métodos indicados por las normas no debe superar los valores indicados en la Tabla 3.4.
TABLA 3.4
| POTENCIA DE LA MAQUINA | FAT |
| desde 300 hasta 1000 kW (kVA) más de 1000 hasta 5000 kW (kVA) más de 5000 kW (kVA) |
5.0% 3.0% 1.5% |
3.15 GRADOS DE PROTECCION
El grado de protección contra la penetración en el interior de la máquina de cuerpos sólidos o de agua está íntimamente vinculado con el tipo de ventilación y refrigeración adoptado, y además con el lugar donde la máquina deberá funcionar, es decir, interior o intemperie.
3.15.1 Algunos tipos de ventilación
La Figura 132 muestra un esquema de ventilación de un máquina protegida. Se observa que el aire ingresa por ambos extremos de la máquina (por el lado acoplamiento directamente y por el lado contrario a través de la excitatriz, refrigerando esta última.
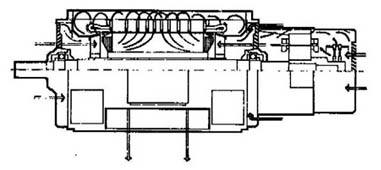
Es conducido adecuadamente e impulsado por dos ventiladores a circular desde los extremos hacia el centro de la máquina.
Parte del aire refrigera las cabezas de bobinas y el resto pasando a través de los canales radiales de refrigeración refrigera las bobinas y el paquete magnético, siendo luego conducido a salir por los costados de la máquina.
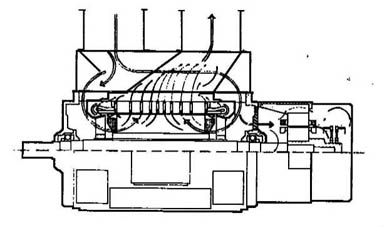
La Figura 133 muestra un esquema de ventilación de una máquina protegida contra la intemperie según las normas americanas NEMA.
- La parte superior encierra el sistema de ventilación.
- La parte inferior encierra la máquina propiamente dicha.
El aire es aspirado a través de amplias aberturas a persiana existentes sobre el cajón superior pasando a través de filtros y, así depurado, experimenta tres cambios de dirección a 90 grados, desciende en la máquina para refrigerar las partes activas en forma análoga a lo descripto en el caso anterior; la sección de los canales debe ser de modo tal de obtener una baja velocidad del aire, no superior a 3 m/s. Por último sale del cajón superior por ambos extremos.
Si se impele demasiado aire la energía necesaria para la ventilación es demasiado grande y ello va en detrimento del rendimiento.
Si el caudal de aire es demasiado bajo la máquina puede superar los niveles de temperatura fijados por las normas.
El caudal de aire que es necesario suministrar a una máquina es proporcional a la energía disipada y depende de la velocidad media del flujo dentro de la misma. Normalmente la velocidad es del orden de 4 a 5 m/s y no debe superar los 7 m/s.
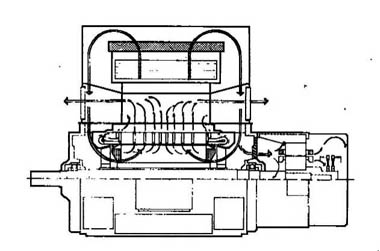
La Figura 134 muestra un esquema de ventilación de una máquina cerrada con bocas de ventilación.
La aspiración y descarga del aire se realiza a través de un cajón dispuesto sobre la carcaza, sobre el cual están ubicadas las bocas para la conexión de los conductos de ventilación. El aire proviene de un ambiente distinto de aquel en el cual está instalada la máquina.
Esta ejecución permite instalar la máquina en ambientes con atmósfera contaminada.
La Figura 135 muestra un esquema de ventilación de máquinas cerradas con refrigeración por agua.
Como se puede observar el circuito de ventilación es cerrado, la refrigeración del aire se realiza mediante un intercambiador de calor aire-agua, montado sobre la carcaza de la máquina que puede ser fácilmente desmontado para el mantenimiento o bien para una eventual reparación, quedando la máquina en condiciones de funcionamiento temporáneo refrigerada con aire a ciclo abierto.
El agua debe ser dulce, sin sustancias que puedan corroer o incrustar los tubos y consecuentemente reducir con el tiempo la capacidad de intercambio de calor del sistema.
3.16 DESCRIPCION DE FORMAS CONSTRUCTIVAS
La Figura 136 muestra en conjunto la construcción de un alternador de eje horizontal.
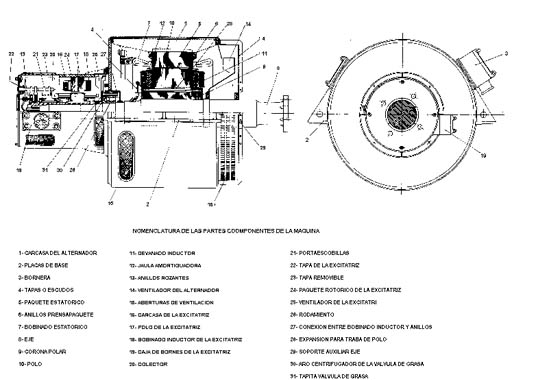
La carcaza está construida en chapa de acero dulce cilindrada y soldada con placas de base para su anclaje sobre la fundación.
La caja de bornes se encuentra ubicada directamente sobre la carcaza.
Las tapas o escudos también están construidos con acero dulce soldado, confiriéndole una adecuada rigidez mediante costillas.
Tiene una sola tapa porta cojinete debido a que esta máquina se acopla rígidamente con el motor primario.
Además es de tipo autoventilado con circuito abierto, protegida contra goteo y entrada de cuerpos sólidos de pequeño tamaño.
Tiene aberturas de ventilación protegidas por medio de una malla metálica o chapa matrizada.
El paquete estatórico está formado por chapas de hierro silicio de 0.5 mm de espesor, tratadas con barnices aislantes con el objeto de disminuir las pérdidas debidas a las corrientes parásitas.
El paquete magnético está montado en la carcaza mediante un adecuado sistema de costillas y anillos prensa paquete.
El inductor está formado por el eje, la corona polar, los polos, los devanados inductores y la jaula amortiguadora. En algunos casos con objeto de lograr un valor de GD2 necesario la máquina puede tener un volante.
La corona polar está construida en acero dulce laminado fijada al eje mediante chavetas tangenciales o por calado en caliente con adecuada interferencia.
Los núcleos polares están construidos formando un paquete de chapas de acero dulce de aproximadamente 1.5 mm de espesor y una vez prensadas mantenidas mediante adecuados planos frontales, los que a su vez están unidos por medio de un tirante pasante soldado a los mismos.
Como se puede observar el montaje de los polos está realizado mediante un encastre de tipo cola de milano y fijado a la corona polar por medio de una chaveta longitudinal.
Los anillos colectores están colocados en el extremo del eje sobre el lado de la excitatriz, y la conexión entre anillos y devanado inductor se efectúa por medio de cables muy flexibles aislados que pasan a través de un orificio (debidamente aislado) que está ejecutado en el mismo eje.
La circulación del aire de refrigeración se obtiene mediante un ventilador instalado sobre la rueda polar.
La excitatriz es un generador de corriente continua de construcción protegida, autoventilada con circuito abierto, estando montado su inducido sobre la prolongación del eje del alternador, y su estator en voladizo sobre un escudo de este último.
La Figura 137 muestra una máquina fabricada con criterios similares, pero con algunas diferencias importantes que se destacan.
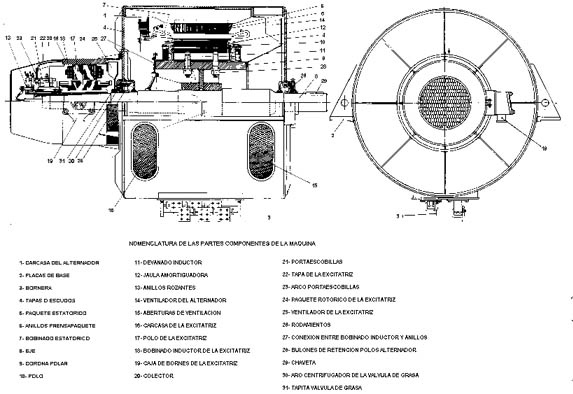
La máquina tiene dos tapas portacojinete y el acoplamiento con el motor impulsor debe ser de tipo elástico.
Esta máquina es de mayor potencia que la anterior, sus bornes están ubicados en la parte central inferior de la carcaza con el objeto de facilitar la conexión de los cables (de gran sección).
La corona polar está constituida con acero dulce cilindrado y soldado y vinculada con el cubo que la fija al eje mediante rayos también soldados. El montaje de los polos se realiza para este caso con bulones de acero.
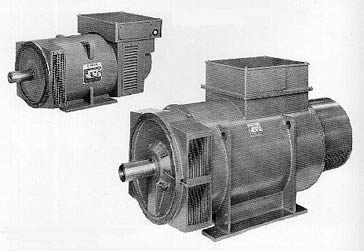
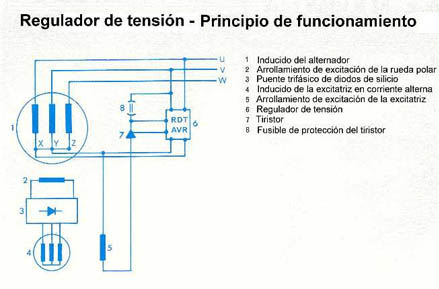
La Figura 138 muestra el aspecto exterior de generadores sincrónicos del tipo sin escobillas ("brushless") con regulador electrónico de tensión incorporado que se encuentra ubicado en la parte superior de la máquina conjuntamente con los bornes de conexión, la figura de arriba corresponde a una máquina tamaño 160, la de abajo tamaño 400, la Figura 139 muestra el principio de funcionamiento del regulador.
Estos alternadores responden a dimensiones normalizadas construidos según cinco alturas de eje distintas y cubren con distinto número de polos, y para distintas tensiones y frecuencias la gama de potencias indicada en la Tabla 3.5.
TABLA 3.5
| POTENCIA kVA |
FRECUENCIA Hz |
POLOS | TENSION V |
| 10 a 1200 | 50 | 4 | 400/231 |
| 12 a 1440 | 60 | 4 | 450/260 |
| 350 a 800 | 50 | 6 | 400 |
| 420 a 960 | 60 | 6 | 450 |
| 210 a 500 | 50 | 8 | 400 |
| 250 a 600 | 60 | 8 | 450 |
La protección normal de estas máquinas es IP21, es decir, no pueden penetrar cuerpos sólidos con un diámetro mayor de 8 mm y además no pueden penetrar gotas de agua que caen verticalmente.
La carcaza está realizada en fundición o en hierro dulce soldado, las tapas o escudos son en fundición con orificios de ventilación.
La Figura 140 muestra algunos detalles constructivos de los rotores correspondientes, arriba tamaño 200, abajo tamaño 400.
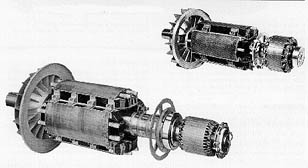
Las ruedas polares están construidas de hierro dulce laminado con jaula amortiguadora realizada con cobre.
La excitatriz de corriente alterna sin escobillas está montada coaxialmente del lado opuesto al acoplamiento.
Se pueden observar los elementos de sujeción del devanado de excitación como así también otros detalles constructivos.
3.17 MOTORES SINCRONICOS
La máquina sincrónica también puede funcionar como motor para accionar por ejemplo compresores y bombas, generalmente se utiliza trabajando con un factor de potencia en adelanto contribuyendo de esta manera a compensar la potencia reactiva de las cargas inductivas.
La Figura 141 muestra un típico motor sincrónico de cuatro polos, totalmente cerrado y refrigerado por agua-aire mediante un intercambiador de calor.
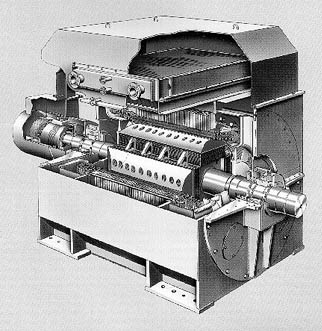
Como se observa el flujo axial de aire es impulsado por un ventilador montado sobre el eje de la máquina y conducido a través de conductos para refrigerar el rotor y el estator, pasando luego a través del intercambiador de calor para retornar nuevamente al circuito de refrigeración.
El sistema de excitación es del tipo sin escobillas con rectificadores rotativos.
Se pueden observar además algunos detalles constructivos del amarrado y sujeción del paquete estatórico mediante dos anillos frontales y tirantes con tuercas de fijación en ambos extremos.
Otro detalle interesante de destacar es la forma de armado de las piezas polares mediante bulones de acero magnético ubicados en adecuadas fresaduras realizadas en la expansión polar.
Las bobinas se colocan en el paquete estatórico fuera de la carcaza y luego todo el conjunto es impregnado con un sistema de aislamiento que se realiza en autoclave mediante un tratamiento de vacío, secado e impregnación con adecuadas resinas epóxicas, y posterior secado en un horno a alta temperatura para endurecerla.
Este sistema confiere al conjunto (bobinas y paquete) una sólida resistencia mecánica y confiable aislación.
Por último se observa en la figura que la máquina tiene cojinetes del tipo con metal antifricción, con refrigeración forzada en aceite.
Para proteger las superficies de metal de los cojinetes de las corrientes que pueden circular por el eje de la máquina produciendo una degradación de las superficies, se aisla adecuadamente respecto al eje de la máquina uno de los cojinetes.
3.18 GRANDES ALTERNADORES
La Figura 142 muestra el paquete estatórico de un generador constituido por chapas magnéticas de hierro silicio, prensado y puede observarse que el conjunto está sujeto por medio de una robusta jaula de acero soldado que garantiza su rigidez.
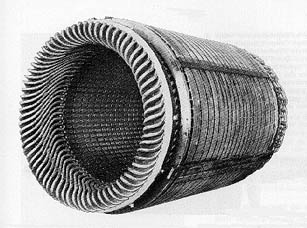
Este tipo de construcción permite realizar el devanado y su impregnación fuera de la carcaza lo cual asegura una mejor ejecución y una impregnación más eficaz, cuando es así se dice que el paquete estatórico esta bobinado fuera de la carcaza.
El paquete una vez terminado con su devanado se monta en caliente en la carcaza, de la cual puede ser retirado con relativa facilidad si fuese necesario sustituirlo.
Se pueden observar los canales radiales de ventilación y los dispositivos de sujeción de las cabezas de bobinas que tienen por finalidad sostener solidariamente esta parte del devanado.
Además estos dispositivos de sujeción de las cabezas de bobinas, se utilizan para sujetar las conexiones frontales de las bobinas entre si para la formación de las respectivas fases o bien las conexiones de los posibles circuitos en paralelo.
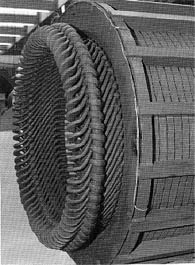
La Figura 143 muestra en detalle las cabezas de bobinas de un alternador de polos salientes de 4 polos (potencia 16 MVA) soportadas con ataduras de fibra de vidrio.
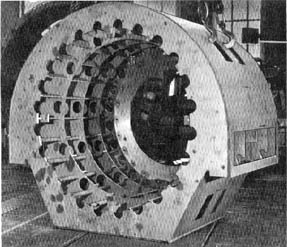
La Figura 144 permite observar algunos detalles constructivos de la carcaza de un generador sincrónico de 22.5 MVA, 13.2 kV, 50 Hz, 4 polos refrigerado con aire.
En la Figura 145 se observa la máquina durante el proceso de montaje del paquete magnético.
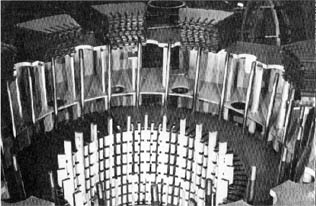
En máquinas de gran tamaño, como estas últimas, el paquete estatórico se debe armar con segmentos de chapas magnéticas prensados en una sola operación (que se observan en la parte superior de la figura) que se van apilando con la ayuda de dispositivos que permiten su perfecta alineación longitudinal.
El montaje se realiza de modo que las juntas que se forman queden alternadas, es decir, se empieza por una primera capa de segmentos colocados uno a continuación del otro; la segunda capa se coloca de modo que la junta entre dos segmentos de la capa anterior se encuentre en la parte central de un segmento, completándose de este modo la segunda capa y así sucesivamente.
Una vez realizada esta operación el paquete es prensado y sujetado mediante los tirantes como se observa en la figura última pudiéndose también ver los canales radiales de ventilación.
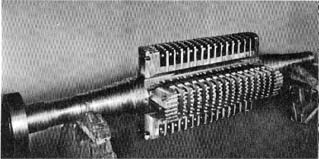
La Figura 146 muestra el eje de la máquina y parte del inductor (cuello) que es un conjunto forjado de una pieza térmicamente tratada en caliente, de resistencia mecánica y permeabilidad magnética elevadas y luego mecanizada.
La Figura 147 indica la forma de la expansión polar, parcialmente laminada, con la zapata polar formada por paquetes remachados, y asegurados al cuerpo macizo en las entalladuras de la figura anterior (previa colocación del devanado de excitación mostrado en la Figura 148), mediante tirantes que pasan a través de los orificios de mayor diámetro, esta forma constructiva se la conoce con el nombre de tipo a peine.
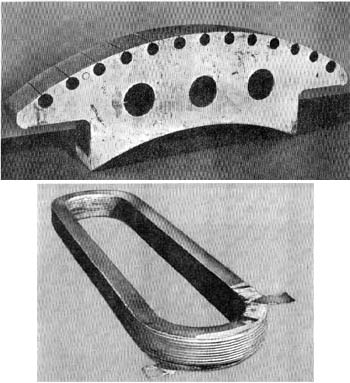
Los restantes orificios que se observan en la zapata polar alojan las barras del devanado amortiguador.
Las barras amortiguadoras están soldadas en ambos extremos a los anillos de cobre los cuales se encuentran reforzados mediante anillos de acero que sirven de montaje de los ventiladores.
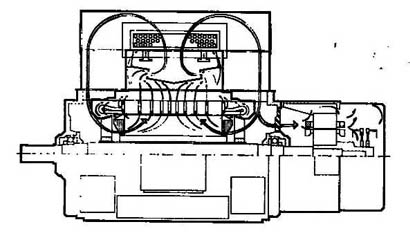
En la Figura 149 se muestra un corte longitudinal de la máquina que permite observar en conjunto algunos detalles constructivos y además el recorrido del flujo del aire de refrigeración.
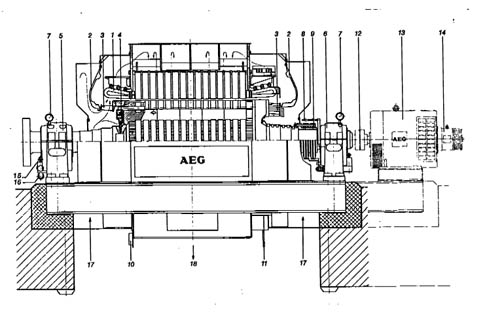
La nomenclatura de las partes componentes de la máquina indicadas en esta última figura se detallan en la Tabla 3.6.
TABLA 3.6
| Pos. | COMPONENTES |
| 1 | Cabeza de bobina |
| 2 | Deflector del aire de refrigeración |
| 3 | Ventilador centrífugo |
| 4 | Devanado de excitación |
| 5 | Soporte cojinete (con refrigeración forzada) lado acoplamiento |
| 6 | Soporte cojinete (con refrigeración forzada) lado excitatriz |
| 7 | Termómetro del cojinete |
| 8 | Barral porta escobillas |
| 9 | Anillos rozantes para alimentar el devanado del inductor |
| 10 | Bornes de conexión de los detectores de temperatura estatórica |
| 11 | Bornes de conexión de la máquina |
| 12 | Acoplamiento elástico de la excitatriz |
| 13 | Excitatriz principal (excitación convencional) |
| 14 | Excitatriz piloto (excitación convencional) |
| 15 | Entrada de aceite forzado |
| 16 | Salida de aceite forzado |
| 17 | Entrada del aire de refrigeración |
| 18 | Salida del aire de refrigeración |
3.19 ESFUERZOS EN LAS CABEZAS DE BOBINAS
La cabeza del devanado estatórico se encuentra solicitada por fuerzas espaciales, no contenidas en un plano, y que varían con una frecuencia doble a la de la red.
Estas fuerzas son proporcionales al cuadrado de la corriente y son muy elevadas tanto en sentido radial como tangencial, de modo que durante un cortocircuito las fuerzas actuantes pueden ser de 60 a 250 veces mayores que durante las condiciones normales de funcionamiento.
El dimensionamiento de los elementos de soporte de las cabezas de bobina no deberá basarse solamente en criterios estáticos, sino que deberá igualmente considerarse el comportamiento dinámico. Se debe tener en cuenta que el aflojamiento del devanado, debido a los desplazamientos relativos de las partes, podría ser la causa de daños locales.
Algunos constructores han previsto dispositivos de retensado de las cabezas de bobina, que pueden verificarse con facilidad durante las revisiones o después de haberse presentado un cortocircuito de magnitud importante, de este modo se puede asegurar que las cabezas del devanado tengan siempre la misma rigidez durante toda la vida útil de la máquina.
Es de suma importancia retensar las cabezas en los primeros años de explotación debido a que durante su funcionamiento se producen aflojamientos que deben ser corregidos a tiempo.
Para conocer el comportamiento estructural de los soportes, y poder evaluar sus características después del montaje del devanado y del soporte de las cabezas del mismo se pueden realizar ensayos, para ello la cabeza del devanado se excita mecánicamente con un dispositivo adecuado y se miden las frecuencias propias y la gráfica de la oscilación.
La frecuencia propia se deberá encontrar suficientemente apartada respecto al duplo de la frecuencia de la red, y que corresponde a la frecuencia de las fuerzas de cortocircuito.
El diseño de un apropiado sistema soporte de cabezas de bobinas se basa en el conocimiento de los esfuerzos actuantes tanto en estado permanente como transitorio.
Dado que estas fuerzas no se pueden medir directamente es esencial que al menos los cálculos teóricos y consecuentemente los esfuerzos, sean controlados mediante mediciones.
De este modo resulta posible cuantificar los errores introducidos por las aproximaciones y simplificaciones que dependen del modelo de cálculo utilizado.
El cálculo de los esfuerzos puede encararse con el principio mostrado en la Figura 151, la fuerza instantánea que actúa sobre un elemento j que conduce corriente debida al elemento k, puede calcularse aplicando la ley de Biot-Savart, siendo:
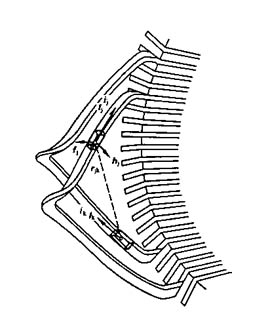
- ij : corriente en el elemento
- lj : longitud del elemento j en dirección de la corriente
- rjk: radio vector entre los elementos j y k
- fj : fuerza instantánea
Las fuerzas de cortocircuito son importantes en todas las máquinas, pero asumen máximos valores en las máquinas de dos polos (grandes turbogeneradores). En cambio en las máquinas de polos salientes, que tienen un paso menor y por consiguiente las cabezas de bobinas sobresalen menos se presentan esfuerzos menores.
En máquinas de gran número de polos aparece otra razón que contribuye a la reducción de los esfuerzos, en efecto las corrientes en las cabezas son relativamente menores porque hay más vías de corriente.
3.20 CRITERIOS DE DIMENSIONAMIENTO Y METODO DE CALCULO
Normalmente se conocen las especificaciones que deberá satisfacer la máquina que se debe proyectar.
Como para el transformador, la especificación conduce a adopciones que deben acompañarse con otras que el proyectista con su mejor criterio debe hacer para avanzar en su tarea.
Quedan entonces definidos:
- El tipo de generador
- La velocidad
- El método de refrigeración
- La clase de aislamiento
- El tipo de excitación
- Algunas características mecánicas
- Los materiales utilizados
Los criterios con los que el proyectista avanza en su tarea, son los mismos ya comentados para el transformador, y en general son válidos cualquiera sea el proyecto de máquina de que se trate.
El método de cálculo adoptado es uno de los posibles, y se ha dividido en pasos que en algunos casos son comunes con otras máquinas.
Es todavía importante recordar que en este texto sólo se encara el cálculo y dimensionamiento electromagnético de las máquinas eléctricas, no debiendo olvidar que particularmente para las máquinas rotantes son fundamentales las verificaciones mecánicas, (esfuerzos, vibraciones, etc.) cuya importancia aumenta con la velocidad y la potencia (tamaño), como así también las verificaciones térmicas (permanentes y transitorias)
3.21 DETERMINACION DE DATOS BASICOS Y PRIMERAS ESTIMACIONES (PASO1)
El cálculo requiere disponer (o adoptar algunos) de los siguientes datos:
- Potencia del generador kVA
- Tensión de generación V
- Frecuencia en Hz
- Conexión (estrella o triángulo)
- Velocidad sincrónica vpm
- Coseno j
- Rendimiento %
Se determina el número de polos en base a la frecuencia y la velocidad sincrónica, controlando que este número debe ser par, y coherente con la frecuencia y la velocidad.
Se calcula la corriente de línea y de fase, en base a la potencia, y se determina la tensión de fase teniendo en cuenta la conexión.
El proyecto básico debe iniciar proponiendo dimensiones que se adoptan con distintos criterios, independientemente de ellos se debe tener claro el significado de estas dimensiones.
En pequeñas máquinas, para potencias hasta alrededor de 100 kVA, los paquetes magnéticos se hacen compactos, es decir, sin canales de ventilación.
Para obtener una adecuada refrigeración en máquinas grandes, es decir, evitar la presencia de zonas calientes en aquellas partes de la máquina donde la ventilación resulta más dificultosa, se adoptan canales radiales de refrigeración.
Para ello se subdivide la longitud del hierro estatórico conformando paquetes que están separados entre si por canales que tienen una dimensión que va de 10 a 15 mm a medida que aumenta la potencia.
Normalmente la longitud de los paquetes está comprendida entre 40 y 80 mm y su longitud se hace decrecer en modo racional desde los extremos hacia el centro del inducido (para hacer más efectiva la refrigeración en esta zona presumiblemente más caliente).
En consecuencia la longitud total del paquete estatórico resulta suma de las longitudes de los paquetes elementales (longitud de hierro) más la longitud que corresponde a los canales de refrigeración.
En correspondencia con los canales radiales de ventilación se produce una desuniformidad del campo magnético (axial) en el entrehierro, un fenómeno similar se presenta en los extremos frontales del paquete.
El efecto de distorsión del campo magnético depende principalmente de la dimensión del entrehierro de la máquina y también de la existencia de canales sólo en el estator, sólo en el rotor o en ambos y para este último caso si se encuentran enfrentados o no.
Otros datos que deben estar impuestos o se deben adoptar con algún criterio son:
- Paso polar en mm
- Relación largo ideal paso polar
- Densidad lineal de corriente A.esp/mm
- Número de ranuras por polo y por fase
- Tipo de entrehierro (variable o constante)
- Factor de devanado
- Factor de apilado del estator
- Ancho total de los canales de ventilación en mm
Recordemos que en este texto se trata de dar criterios generales de dimensionamiento aplicables a máquinas de pequeña y mediana potencia.
También se hacen comentarios aplicables a máquinas de gran tamaño, sin pretender agotar estos complejos temas.
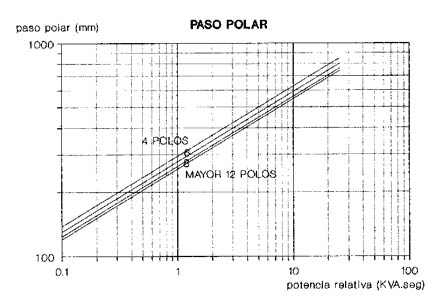
El paso polar se determina en base a la potencia relativa (en kVA.seg) que se obtiene de dividir la potencia por el número de polos, la frecuencia y la relación lamda (largo ideal / paso polar).
En consecuencia antes de adoptar el paso polar se debe proponer un valor adecuado de lamda, para lo cual se puede utilizar la Figura 152 da la relación entre el largo ideal y el paso polar (lamda) en función del número de polos.
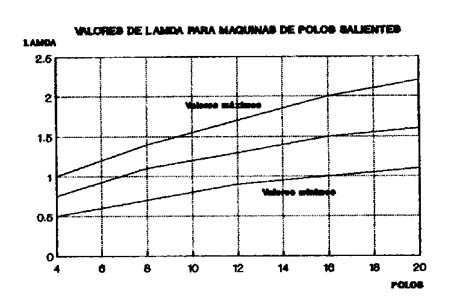
Valores elevados de esta relación conduce a obtener máquinas más largas y en consecuencia de construcción más económica, pero con mayores problemas de refrigeración, siendo esta dificultad la que impone un límite a la longitud de la máquina.
La tendencia actual es la de construir máquinas de mayor longitud, estudiando adecuadamente su refrigeración.
Los valores de lamda son sensiblemente más altos en turbogeneradores (máquinas de dos polos) por razones de resistencia mecánica.
Adoptado lamda, determinada la potencia relativa y con el número de polos, de la Figura 153 se obtiene el valor tentativo del paso polar y en consecuencia queda determinado el diámetro al entrehierro de la máquina y el largo ideal.
No se comete un error grosero en las primeras iteraciones de cálculo de una máquina rotante si se considera que el largo ideal es igual al largo total del núcleo.
El largo ideal tiene en cuenta las líneas de campo que entran lateralmente en los extremos del núcleo y a través de los canales radiales de ventilación (cuando existen).
Para tener en cuenta el efecto del ancho de los canales de ventilación se debe determinar un ancho equivalente.
Cuando no hay canales radiales de ventilación la longitud ideal es la del núcleo (con un error mínimo), mientras que cuando la máquina tiene canales se tienen que determinar tres longitudes: la del núcleo, la del hierro y la ideal.
Debido a los canales de ventilación la permeancia no es constante a lo largo de la máquina y por lo tanto la inducción en el entrehierro experimenta variaciones en el sentido axial, presentando una disminución frente a los canales de ventilación. El ancho magnético equivalente del canal depende de su ancho geométrico y del entrehierro de la máquina.
Si se trata de máquinas donde únicamente en una parte estator o rotor hay canales radiales de refrigeración, el largo ideal se determina descontando al largo total del estator o del inducido, el número de canales por el ancho (magnético) equivalente del canal.
Cuando ambas partes de la máquina tienen canales de ventilación, estos pueden encontrarse enfrentados o no.
Si se encuentran enfrentados la longitud ideal se determina en igual forma al caso en que se tienen canales de un solo lado, cuando en cambio no están enfrentados se debe descontar al largo total la suma del producto del número de canales estatóricos por su ancho equivalente más el número de canales rotóricos por su correspondiente ancho equivalente (los canales del estator y rotor pueden tener distinta dimensión).
Las máquinas de polos salientes y los turbogeneradores tienen entrehierros relativamente grandes (respecto del ancho de los canales que normalmente se utilizan) por lo que el ancho equivalente es relativamente pequeño y consecuentemente el largo ideal está más próximo al largo del núcleo.
La densidad lineal de corriente, magnitud análoga a la utilizada en el diseño del transformador, se calcula en las máquinas rotantes multiplicando el número de fases, por el número de conductores por fase, por la corriente de fase y dividido por el desarrollo del entrehierro.
Las máquinas rotativas están constituidas por materiales activos (hierro y conductores) en los cuales se generan pérdidas, y por materiales inertes (aislantes).
Los materiales activos poseen una gran conductividad térmica al menos en una dirección.
Ello conduce a pensar que los mismos se calientan uniformemente, es decir, que la temperatura es la misma en todos los puntos.
Si una parte activa de la máquina posee superficies terminales diversamente refrigeradas, y por lo tanto temperaturas distintas, se establece un flujo térmico interno.
Las partes inertes atravesadas por el flujo térmico, son principalmente los materiales aislantes y las superficies en contacto con el fluido refrigerante.
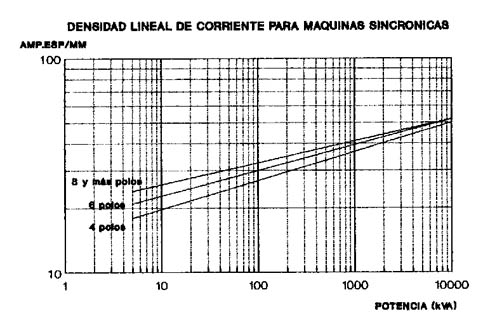
La densidad lineal de corriente tiene relación con el calentamiento de la máquina y se elige en función de la potencia y del número de polos.
Se determina si corresponde la relación entre el largo ideal y el paso polar en base al número de polos.
Luego se determina si corresponde en base al gráfico de la Figura 153 el paso polar.
Con estos datos se determina el diámetro al entrehierro y la longitud ideal.
Por último se determina la densidad lineal de corriente en el caso de no haber sido impuesta, los valores utilizados fueron extraídos de la Figura 154, pero se han incrementado con un factor 1.2 para adecuarlo a las construcciones actuales.
3.22 FUERZA ELECTROMOTRIZ INDUCIDA
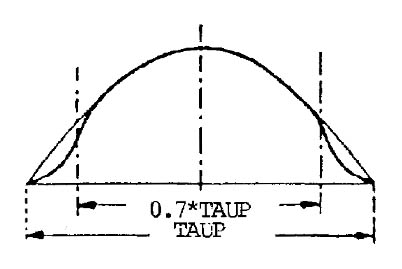
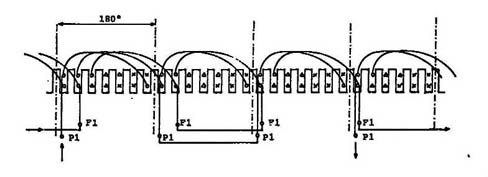
Si en un alternador de polos salientes en vacío relevamos la distribución de la componente de la inducción normal a la superficie del entrehierro, se obtiene un diagrama que se aparta notablemente de una onda sinusoidal según indica la Figura 155.
Su forma está influenciada por diversos factores como ser la relación entre la longitud de la expansión polar y el paso polar, la dimensión del entrehierro en cada uno de sus puntos (entrehierro constante o variable), la forma de la ranura, la saturación de los dientes.
Actuando adecuadamente sobre estos diversos elementos es posible modificar, claro está dentro de ciertos límites, la distribución del flujo a lo largo del entrehierro, y en consecuencia el grado de deformación de la onda de tensión respecto de una onda sinusoidal.
En la Figura 155 se indica como ya hemos mencionado la forma del campo magnético en vacío producida por un inductor de polos salientes, para una relación igual a 0.7
A medida que esta relación aumenta la forma del campo se hace más sinusoidal, pero aumenta notablemente el flujo de dispersión que se establece entre dos polos inductores contiguos.
Como consecuencia de ello el valor óptimo normalmente utilizado es 2/3 que resulta de una situación de compromiso entre la deformación del campo y el valor de la dispersión entre polos aceptables.
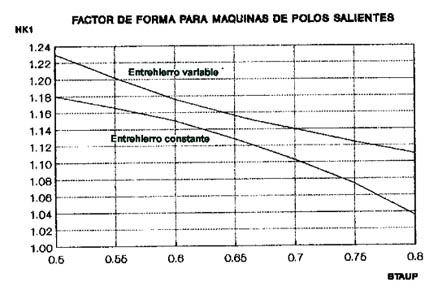
De esta relación y del tipo de entrehierro (constante o variable) depende además el factor de forma que se indica en la Figura 156 y que se utiliza en el cálculo de la fundamental de la f.e.m. con la fórmula:

siendo:
- HK1 : factor de forma
- HK2 : factor de distribución
- HK3 : factor de acortamiento
- HN : número de conductores activos por fase
- FO : frecuencia
- WB : flujo
Para una dada curva de campo se puede realizar un análisis armónico que conduce a considerar una distribución de flujo constituido por una suma de flujos sinusoidales de frecuencia creciente con la serie de números impares.
La fuerza electromotriz inducida se puede expresar con la fórmula:

donde

siendo:
- n: orden de la armónica
- HK2n: factor de distribución de la armónica considerada
- HK3n: factor de acortamiento de la armónica considerada
- HN: número de conductores activos por fase
- FOn: frecuencia de la armónica considerada
- WBn: flujo de la armónica considerada
El factor de distribución para un arrollamiento trifásico en función del orden de la armónica se calcula con la expresión (válida para ángulos dados en grados):
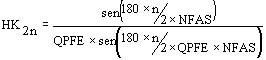
siendo:
- NFAS: número de fases
- QPFE: ranuras por polo y por fase equivalentes
El factor de acortamiento en función del orden de la armónica se calcula con la expresión:
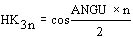
siendo ANGU el ángulo de acortamiento de la bobina.
Es importante recordar que en la conexión estrella las armónicas tercera y sus múltiplos (homopolares) tienen resultante nula, es decir, no aparecen en la tensión de línea.
Las armónicas de las cuales es necesario preocuparse con el objeto de reducir su magnitud son la quinta y la séptima.
Como se puede observar en la Tabla 3.7 los factores de distribución, a medida que crece el orden de la armónica decrecen más rápidamente con el incremento del número de ranuras por polo y por fase que el correspondiente para la fundamental.
El factor de distribución puede ser negativo, y ello significa que esta armónica se encuentra en oposición de fase respecto de la fundamental.
Las Figura 157 - 158 - 159, muestran los valores del factor de distribución en función del orden del armónico poniéndose en evidencia que a medida que aumenta el número de ranuras por polo y por fase, los armónicos para los que se presenta el valor del factor de distribución igual al de la fundamental se alejan más entre si, por ejemplo para QPF = 2 los máximos se presentan para n = 11, 13, 23, 25 mientras que para QPF = 5 se presentan para n = 29, 31, 59, 61.

Surge inmediatamente que una forma de reducir la distorsión de la forma de onda de la f.e.m. inducida, es la de adoptar un número elevado de ranuras por polo y por fase.
Como es lógico la ejecución de la máquina impone por razones constructivas y económicas límites prácticos al número de ranuras totales.
TABLA 3.7
| QPF | 1 | 2 | 3 | 4 | 5 | 6 | 10 | Infinito |
| n | ||||||||
| 1 | 1.000 | 0.966 | 0.960 | 0.958 | 0.957 | 0.956 | 0.955 | 0.955 |
| 3 | 1.000 | 0.707 | 0.667 | 0.653 | 0.647 | 0.644 | 0.639 | 0.637 |
| 5 | 1.000 | 0.259 | 0.218 | 0.205 | 0.200 | 0.197 | 0.193 | 0.191 |
| 7 | 1.000 | -0.259 | -0.177 | -0.158 | -0.149 | -0.145 | -0.140 | -0.136 |
| 9 | 1.000 | -0.707 | -0.333 | -0.271 | -0.247 | -0.236 | -0.220 | -0.212 |
| 11 | 1.000 | -0.966 | -0.177 | -0.126 | -0.109 | -0.102 | -0.092 | -0.087 |
| 13 | 1.000 | -0.966 | 0.218 | 0.126 | 0.102 | 0.092 | 0.079 | 0.073 |
| 15 | 1.000 | -0.707 | 0.667 | 0.271 | 0.200 | 0.173 | 0.141 | 0.127 |
| 17 | 1.000 | -0.259 | 0.960 | 0.158 | 0.102 | 0.084 | 0.064 | 0.056 |
| 19 | 1.000 | 0.259 | 0.960 | -0.205 | -0.109 | -0.084 | -0.060 | -0.050 |
| 21 | 1.000 | 0.707 | 0.667 | -0.653 | -0.247 | -0.173 | -0.112 | -0.091 |
| 23 | 1.000 | 0.966 | 0.218 | -0.958 | -0.149 | -0.092 | -0.054 | -0.042 |
| 25 | 1.000 | 0.966 | -0.177 | -0.958 | 0.200 | 0.102 | 0.052 | 0.038 |
| 27 | 1.000 | 0.707 | -0.333 | -0.653 | 0.647 | 0.236 | 0.101 | 0.071 |
| 29 | 1.000 | 0.259 | -0.177 | -0.205 | 0.957 | 0.145 | 0.050 | 0.033 |
| 31 | 1.000 | -0.259 | 0.218 | 0.158 | 0.957 | -0.197 | -0.050 | -0.031 |
| 33 | 1.000 | -0.707 | 0.667 | 0.271 | 0.647 | -0.644 | -0.101 | -0.058 |
| 35 | 1.000 | -0.966 | 0.960 | 0.126 | 0.200 | -0.956 | -0.052 | -0.027 |
| 37 | 1.000 | -0.966 | 0.960 | -0.126 | -0.149 | -0.956 | 0.054 | 0.026 |
| 39 | 1.000 | -0.707 | 0.667 | -0.271 | -0.247 | -0.644 | 0.112 | 0.049 |
| 41 | 1.000 | -0.259 | 0.218 | -0.158 | -0.109 | -0.197 | 0.060 | 0.023 |
| 43 | 1.000 | 0.259 | -0.177 | 0.205 | 0.102 | 0.145 | -0.064 | -0.022 |
| 45 | 1.000 | 0.707 | -0.333 | 0.653 | 0.200 | 0.236 | -0.141 | -0.042 |
| 47 | 1.000 | 0.966 | -0.177 | 0.958 | 0.102 | 0.102 | -0.079 | -0.020 |
| 49 | 1.000 | 0.966 | 0.218 | 0.958 | -0.109 | -0.092 | 0.092 | 0.019 |
| 51 | 1.000 | 0.707 | 0.667 | 0.653 | -0.247 | -0.173 | 0.220 | 0.037 |
| 53 | 1.000 | 0.259 | 0.960 | 0.205 | -0.149 | -0.084 | 0.140 | 0.018 |
| 55 | 1.000 | -0.259 | 0.960 | -0.158 | 0.200 | 0.084 | -0.193 | -0.017 |
| 57 | 1.000 | -0.707 | 0.667 | -0.271 | 0.647 | 0.173 | -0.639 | -0.034 |
| 59 | 1.000 | -0.966 | 0.218 | -0.126 | 0.957 | 0.092 | -0.955 | -0.016 |
| 61 | 1.000 | -0.966 | -0.177 | 0.126 | 0.957 | -0.102 | -0.955 | 0.016 |
| 63 | 1.000 | -0.707 | -0.333 | 0.271 | 0.647 | -0.236 | -0.639 | 0.030 |
| 65 | 1.000 | -0.259 | -0.177 | 0.158 | 0.200 | -0.145 | -0.193 | 0.015 |
El número de ranuras por polo depende de la dimensión del paso polar y de la tensión nominal de la máquina.
Cuanto menor es el paso polar y más alta es la tensión, tanto menor debe ser el número de ranuras por polo para reducir el porcentual del espacio ocupado por los materiales aislantes del devanado.
Es por este motivo que para máquinas de alto número de polos (hidrogeneradores) que tienen naturalmente un número de ranuras por polo y por fase relativamente pequeño, es conveniente adoptar un número de ranuras por polo y por fase fraccionario, y de este modo aun con un valor pequeño se puede obtener una forma de onda de tensión con un bajo contenido armónico.
El número de ranuras por polo y por fase del inducido se encuentra normalmente dentro de los siguientes límites:
- Máquinas de polos salientes trifásicas entre 1.5 y 5
- Turbogeneradores trifásicos entre 5 y 12
Se nota en la tabla que el factor de distribución para cada valor de ranuras por polo y por fase, tiene para algunas armónicas el mismo valor que para la fundamental.
Estas armónicas que se las denomina armónicas de ranura, producen deformaciones en la cresta de la onda debido a la discontinuidad que introducen las ranuras en la superficie del inducido.
En general las armónicas de ranura no son de gran amplitud pero aunque pequeña, debido a su frecuencia elevada, pueden resultar una fuente de ruido introduciendo disturbios en los circuitos de comunicaciones.
El orden de la armónica se calcula con la expresión:
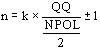
donde k = 1,2,3,...
Estas armónicas pueden atenuarse inclinando los bordes de la expansión polar respecto del eje de la máquina de una distancia igual a un paso de ranura del estator.
La práctica muestra que la relación entre la longitud de la expansión polar y el paso polar 2/3 es adecuada. La rutina DETALF utiliza este valor considerado correcto en aplicaciones normales y para uso didáctico.
3.23 DEVANADOS DE ALTERNA
Los dos problemas que se presentan en la realización de los devanados abiertos de corriente alterna utilizados en los alternadores y motores de inducción son:
- La forma de conexión de los conductores entre sí para formar una fase.
- La forma de conexión de las fases entre sí y a la línea.
Estudiaremos en particular los devanados trifásicos que tienen dos lados por ranura (a doble estrato) muy utilizados en la práctica.
Respecto a los arrollamientos a simple estrato tienen la ventaja de permitir la adopción de un paso de devanado acortado en un número de ranuras cualquiera, lo que permite anular (cuando se puede) o atenuar la quinta y la séptima armónicas, siendo aconsejable para ello elegir un acortamiento de alrededor de 30 grados eléctricos.
El acortamiento de paso reduce la longitud de las cabezas de bobina lo cual redunda en economía (menor peso de conductor) y además como se verá más adelante incide en el aporte que la cabeza de bobina hace a la reactancia de dispersión del devanado.
Estos devanados se caracterizan por tener un número de bobinas igual al de ranuras. Por lo general, las cabezas de los devanados son iguales y están distribuidos en dos capas, y además todas las bobinas son iguales.
Cuando el número de ranuras por polo y por fase es entero la realización del devanado es inmediata, no obstante ello el siguiente ejemplo pone en evidencia como se conduce esta parte del cálculo.
Ejemplo:
Con los siguientes datos se debe diseñar un devanado:
- NFAS (número de fases) = 3
- NPOL (número de polos) = 8
- QPF (número de ranuras por polo y por fase) = 2
Queda definido de este modo el número de ranuras totales de la máquina (QQ) que es igual a 48.
De estas 48 ranuras corresponden 1/3, es decir, 16 ranuras a cada fase y estas se deben distribuir con regularidad debajo de todos los polos.
Resulta evidente que este caso se tienen 6 ranuras por polo según se puede ver en la Figura 166.
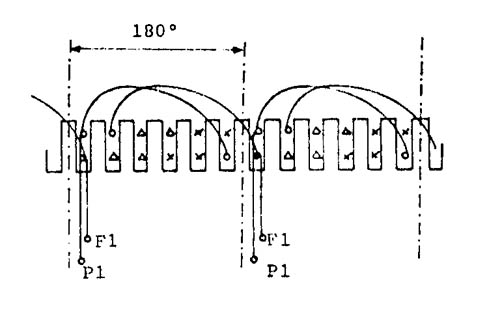
Con el número de ranuras por polo se determina el ángulo eléctrico por ranura 180/6 = 30 grados.
Como se puede observar en este ejemplo resulta posible efectuar un acortamiento del paso de la bobina de 1 ranura, que como se dijo anteriormente es el acortamiento conveniente.
Se ha representado solamente el devanado de una fase debajo de un par de polos, indicándose el principio y el final de cada bobina y para mayor claridad del dibujo solamente las cabezas de bobina de un solo extremo de la máquina.
El devanado se repite en forma idéntica para los restantes polos, debiendo conectarse el final de las bobinas debajo del primer polo con el final de las bobinas debajo del segundo polo; el principio de las bobinas debajo del segundo polo con el principio de las bobinas debajo del tercer polo y así sucesivamente quedando de este modo dos extremos libres que son el principio y el final de la fase considerada.
En este caso las bobinas debajo de cada polo de la fase considerada están conectadas en serie de modo tal que las f.e.m. se sumen y en sus extremos se tiene la tensión de fase deseada. Debido a la uniformidad a que se hizo mención las bobinas debajo de cada polo tienen todas la misma f.e.m. y la misma fase, y pueden por consiguiente conectarse todas en paralelo o bien conectar las bobinas debajo de cada par de polos en serie y estos cuatro grupos de bobinas en paralelo.
Los devanados a doble estrato que tienen un número de ranuras por polo y por fase entero, tienen la ventaja de una mayor flexibilidad para realizar circuitos en paralelo, el número máximo de vías de corriente por fase es igual al número de polos; en general el número de ramas posibles (entero) se obtiene a partir de los divisores del número de polos.
Un arrollamiento dado se puede realizar conectando en serie entre sí los distintos grupos simétricos que pueden formarse, y estos a su vez en paralelo, teniéndose que verificar para que las ramas resulten absolutamente equivalentes que tengan la misma resistencia y reactancia por fase.
Claro está que para que no varíe la tensión de fase el número de conductores (activos) que contribuyen a formar la f.e.m. total de la fase debe ser el mismo, independientemente de como se conecten las bobinas debajo de cada polo.
Esto significa que en el caso último considerado, es decir, cuatro grupos en paralelo, el número de conductores de cada bobina deberá ser cuatro veces mayor pero como la corriente de fase se reparte ahora en las cuatro ramas en paralelo su sección deberá ser cuatro veces menor.
En consecuencia el peso del conductor es el mismo, pero la sección que se maneja es menor facilitando la realización práctica de las bobinas. En este caso no todos los conductores que se pueden observar en la ranura contribuyen a la f.e.m. total razón por la cual se los denomina conductores presentes.
El número de conductores presentes resulta entonces igual al número de conductores activos multiplicado por el número de ramas en paralelo (o vías de corriente).
Los principios de las tres fases deben encontrarse a 120 grados eléctricos entre sí. En realidad lo que se pretende es que las f.e.m. resultantes en cada fase estén a 120 grados eléctricos entre si.
Por razones de comodidad constructiva no es rigurosamente necesario que los principios de las tres fases se encuentren a 120 grados eléctricos entre sí, es decir, los principios estarán separados 120 + n ´ 360 grados eléctricos, donde "n" puede ser igual a 0, 1, 2 etc.
Veamos ahora como se generan los devanados con un número de ranuras por polo y por fase fraccionario y cuales son sus características.
En el ejemplo anterior hemos visto que a cada fase le correspondían 16 ranuras. Si adicionamos una ranura por fase el número de ranuras totales de la máquina resulta igual a 17´ 3 = 51.
La ranura por fase que hemos adicionado se debe repartir teóricamente debajo de los 8 polos que tiene la máquina, en consecuencia el número de ranuras por polo y por fase se ve incrementado en 1/8 resultando su nuevo valor 2 1/8 que expresado como fracción de dos números enteros resulta 17/8
Si adicionamos otra ranura por fase el nuevo número de ranuras totales resulta igual a 18´ 3 = 54.
Con un razonamiento análogo al anterior el número de ranuras por polo y por fase se incrementa en 2/8 y su nuevo valor resulta 2 2/8 que expresado como función de dos números enteros es igual a 18/8.
Como resulta evidente el numerador de la fracción es el número de ranuras por fase y el denominador es el número de polos de la máquina.
Ahora bien en el primer caso el máximo común divisor entre el numerador y el denominador es igual a 1.
En el segundo caso el m.c.d. es igual a 2 y por lo tanto el número de ranuras por polo y por fase es igual a 9/4.
El número de ranuras por fase dividido este m.c.d. da el número de ranuras equivalentes por polo y por fase, en este caso 9.
El número de ranuras por polo y por fase es 2.25, su realización práctica exige un número de ranuras por polo y por fase entero (2 ó 3), se introduce de este modo una asimetría en el devanado como se puede observar en la Figura 167, es decir, debajo de los tres primeros polos se tienen 7 ranuras y debajo del último polo solamente 6.
Debido a que cada costado de bobina alojado en una ranura ocupa una posición diferente frente al polo correspondiente como se observa en la figura, se obtiene de este modo una mejor distribución del devanado y a los efectos del cálculo de los coeficientes de distribución para las distintas armónicas es equivalente a como si el número de ranuras por polo y por fase fuese igual a 9.
El número de polos totales dividido por el m.c.d. da el número de polos de la unidad de devanado.
En el caso que estamos considerando es igual a 4, es decir, para poder realizar el devanado que permita obtener tres tensiones de igual módulo y desfasadas entre si en 120 grados se requiere utilizar la mitad de los polos de la máquina.
Debajo de los otros 4 polos restantes se puede realizar un devanado idéntico al anterior donde las f.e.m. de las fases tienen igual magnitud y fase, por lo tanto se puede conectar este último en paralelo con el primero.
El número de vías de corriente en los devanados que tienen un número de ranuras por polo y por fase fraccionario es igual a este m.c.d., es decir, no se tiene la flexibilidad como ya visto cuando el número de ranuras por polo y fase es entero, siendo esto una limitación de estos devanados.
Con referencia al número de conductores activos y presentes son válidas las consideraciones realizadas para los devanados que tienen un número de ranuras por polo y por fase entero.
Además la relación entre el número de polos por unidad de devanado y el número de fases no debe ser entero a fin de que el devanado sea construible.
En el ejemplo considerado el número de ranuras por polo es igual a 54/8 = 6.75 por lo tanto el ángulo eléctrico de una ranura es igual a 180/6.75 = 26.6 grados.
Veamos ahora el criterio con que se debe elegir el acortamiento del paso de la bobina.
Como el número de ranuras por polo es igual a 6.75 quiere decir que si no efectuamos ningún acortamiento se debería ir de la ranura 1 a la 7.75, por lo tanto si el paso se realiza de la ranura 1 a la 7 el acortamiento resultante es igual a 0.75´ 26.6 = 20 grados.
La otra posibilidad sería acortar el paso en una ranura más, es decir, el acortamiento resultará igual a 1.75´ 26.6 = 46.6 grados, pero en este caso se lo considera excesivo, por cuanto el valor de 20 grados está más próximo al acortamiento conveniente.
En el programa se llama una rutina para aceptar y verificar o proponer un número de ranuras por polo y por fase, cuando el usuario no lo propone.
Si el número de ranuras por polo y fase es entero se lo acepta y se determina el número de ranuras equivalente (que coincide con el número de ranuras por polo y fase) y el número de ranuras por polo y totales.
Si en cambio el número de ranuras es fraccionario eventualmente se ajusta un número de ranuras por polo y totales.
Si este número es nulo (recordemos que estamos ejecutando el programa de cálculo de la máquina sincrónica) se propone en función del número de polos, un valor fraccionario adecuado.
El número de ranuras por fase debe ser entero, debe entonces controlarse que el número de ranuras por fase sea entero y eventualmente se ajusta.
Partiendo del número de ramas por fase y el número total de polos busca el máximo común divisor entre éstos, el número de ranuras por fase dividido este máximo común divisor da el número de ranuras equivalentes.
El número de polos totales dividido por ese mismo factor da el número de polos de la unidad de devanado.
La relación entre el número de ranuras por polo y por fase equivalente y el número de polos de la unidad de devanado da el número de ranuras por polo y por fase expresada como fracción de dos números enteros.
Aplicando el algoritmo de Euclides se determina el máximo común divisor que es el número de ramas en paralelo.
La relación entre el número de polos por unidad de devanado y el número de fases no debe ser entero a fin de que el devanado sea construible.
Si en ese momento esta relación fuese un entero se incrementa en uno el número de ranuras por fase y se recicla volviéndose a efectuar las tareas ya descriptas.
Cuando el número de ranuras por polo y fase es fraccionario se determina como se debe realizar el bobinado, en cambio cuando el número de ranuras por polo y fase es entero, la construcción del devanado es inmediata.
A este punto se conocen el número de ranuras totales, el número de fases y de polos de la máquina.
Se ha determinado el máximo común divisor del número de ranuras por fase y el número de polos que define la unidad de devanado.
Se entiende por unidad de devanado la mínima cantidad de ranuras y polos que permiten obtener un devanado que genere un sistema de tensiones simétricas.
El bobinado se debe distribuir de modo de tener debajo de los polos de la unidad de devanado el número correspondiente de ranuras totales de dicha unidad con regularidad.
Para ello se construye una matriz que tiene en una de sus dimensiones tantas filas como polos de la unidad de devanado y en la otra tantas columnas como ranuras de la unidad de devanado.
En la parte superior de la "Tabla de valores de determinación del número de grupos y de bobinas de cada grupo" (ver corrida) se indica con 1, 2 y 3 cuales son los elementos de la matriz que corresponden a cada una de las fases.
Para ello partiendo del primer elemento, que corresponde a un costado de bobina, se dejan libres tantos espacios como el número de polos de la unidad de devanado menos uno.
Observando en la matriz la ubicación de los elementos que representan costados de bobina para cada una de las fases, se obtiene la distribución que satisface las condiciones de simetría requeridas.
La "Tabla de valores de número de grupos de bobinas de cada fase del devanado debajo de cada polo", sintetiza la cantidad de ranuras por fase y la secuencia de ubicación debajo de los polos de la unidad de devanado.
Los grupos de bobinas de una misma fase deben conectarse de modo de obtener la tensión de fase correspondiente.
Se determina por último el número de conductores activos por fase teóricos partiendo del valor de la densidad lineal de corriente adoptado. Se determina el flujo por polo correspondiente.
3.24 DETERMINACION DEL ARROLLAMIENTO (PASO 2)
Otro conjunto de datos o adopciones permite definir:
- Entrehierro (mm)
- Número de vías de corriente
- Densidad de corriente (A/mm²)
- Coeficiente de aprovechamiento
- Resistividad (ohm´ mm²/m)
- Peso específico (kg/dm3)
- Inducción en la corona (T)
Como hemos visto la forma del campo debe ser lo más sinusoidal posible, debiendo mantenerse esta condición aún en carga.
La longitud del entrehierro se debe determinar de modo tal que la distorsión del campo inductor resultante, en carga, se encuentre dentro de límites admisibles.
La distorsión del campo inductor resultante se debe a la presencia de la f.m.m. de reacción de inducido que actuando conjuntamente con la f.m.m. del campo creado por el inductor determinan la f.m.m. resultante.
Cabe recordar que la curva de inducción en carga no es igual a la suma algebraica de las dos anteriormente mencionadas, debido a los efectos de la saturación (en un extremo de la expansión polar el campo se incrementa y satura, en el otro se debilita).
Las siguientes fórmulas sirven según sea el tipo de entrehierro adoptado, para determinar un valor adecuado del mismo para una distorsión admisible del campo en carga.
-
1. entrehierro constante

-
2. entrehierro variable (en el eje del polo)

Las expresiones indicadas muestran que en el eje del polo el entrehierro constante resulta mayor que si fuera variable en la relación 0.75/0.30 = 2.5 para un mismo valor AFC/BEN.
De esto surge que las máquinas de polos salientes con entrehierro constante requieren una f.m.m. de excitación en el inductor mayor de aquellas cuyo entrehierro es variable.
Se determina la inducción en el entrehierro:
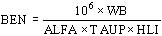
Siendo ALFA un coeficiente que da la relación entre la inducción máxima y media y que depende de la forma del campo, es decir, de la relación BETAUP adoptada. Este coeficiente se indica en la Figura 168 para entrehierro constante y variable.
Si corresponde se determina el entrehierro teniendo en cuenta si es variable o constante, luego se determina el diámetro del rotor.
El programa determina el número de vías de corriente externas (NVIAS), validando el número de paralelos entrado, y controlando que sea un valor igual o menor que el número impuesto y que sea una parte entera del máximo común divisor entre el número de ranuras por fase y el número de polos hallado en el paso anterior mediante el algoritmo de Euclides.
Conductores activos por ranura son los que participan en la generación de la f.e.m.
El número de conductores presentes por ranura está dado por el producto del número de conductores activos por ranura por el número de vías en paralelo (internas y vías de corriente externas), es decir, es el número de conductores que participan en la conducción de la corriente (total de la fase de la máquina).
El número de conductores dentro de la ranura (presentes sin tener en cuenta el número de vías internas) debe ser par, es decir, el número de conductores activos por ranura por el número de vías debe ser par.
Es importante destacar que en la etapa de diseño del devanado, cuando se desea encontrar la solución contructiva, es decir elegir la sección del conductor a utilizar si se trata de redondo su diámetro, la cantidad de conductores presentes por estrato debe ser divisible por el número de vías internas para que el devanado sea realizable.
Se determina el acortamiento (ángulo eléctrico) y el paso acortado utilizado (entero).
Para la armónica fundamental, se determina el factor de distribución, de acortamiento y de devanado.
Se corrige el flujo por el número de conductores adoptado y el factor de devanado determinado, al final se corrige la inducción y se recalcula la densidad lineal de corriente definitivamente adoptada.
Se determina (utilizando reiteradamente la misma rutina), para distintas armónicas los factores de distribución, acortamiento y devanado e imprime una tabla con esta información de proyecto que ayuda a evaluar la distorsión de la onda de tensión.
Con la densidad de corriente se determina la sección del conductor activo, con el número de conductores activos por ranura la sección total de conductor de la ranura. Con el coeficiente de aprovechamiento (tiene en cuenta solamente la aislación entre espiras) la sección bruta del conductor, una rutina imprime los resultados.
Además se determina el diámetro de un eventual conductor de sección circular. Si este valor resulta excesivo, es decir, supera los límites prácticos, el usuario en la etapa de transformar los cálculos en proyecto constructivo, deberá subdividir adecuadamente esta sección adoptando varios conductores en paralelo (paralelos internos), o planchuelas si el proyecto de la máquina así lo requiere.
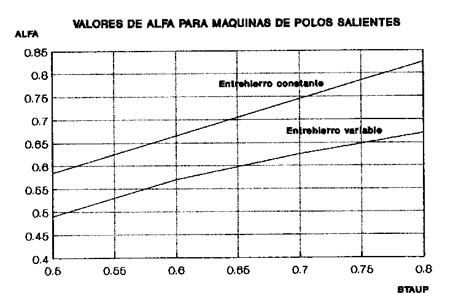
3.25 DETERMINACION DE LA RANURA (PASO 3)
En la Figura 169 se indican los esquemas representativos de algunas de las formas de ranuras más utilizadas en las construcciones normales de distintos tipos de máquinas rotantes.
Las ranuras tipo 1 (abierta rectangular) y tipo 2 (semicerrada rectangular) se pueden utilizar tanto en la construcción de paquetes estatóricos como rotóricos (motores asincrónicos, máquinas de corriente continua).
Las ranuras tipo 3 (semicerrada trapezoidal) y tipo 4 (semicerrada trapezoidal con fondo semicircular) se utilizan (como es obvio por su forma) exclusivamente en la construcción de paquetes estatóricos.
También hay ranuras semicerradas trapezoidales (tipo 7 incluida en la figura 161) que se utiliza en rotores de jaula simple de motores asincrónicos trifásicos cuya potencia va de 4 a 10 kW, cuya jaula está realizada en aluminio fundido (generalmente con el proceso de fundición inyectada).
La ranura tipo 6 (semicerrada trapezoidal) se utiliza para rotores bobinados de motores asincrónicos trifásicos con potencia superior a los 2 ó 3 kW.
Debe destacarse que la forma que muestra la figura para esta ranura está estilizada en modo importante, su forma real tiene amplios radios de curvatura (para facilitar la fusión del metal) o bien para alojar los conductores de sección circular en el caso de rotor bobinado.
La ranura tipo 5 (semicerrada redonda), se utiliza en rotores de motores asincrónicos de jaula o bien en la construcción de los devanados amortiguadores de los alternadores, con barras redondas.
Para los alternadores la elección del tipo de ranura a utilizar en el inducido se debe realizar en función del tamaño de la máquina (potencia y tensión).
Si la máquina es de baja tensión y su devanado es realizable con conductor de sección redonda las ranuras más apropiadas son las tipo 2, 3 y 4 (semicerradas), y la elección final depende de otras consideraciones vinculadas con el diseño (mejor aprovechamiento del espacio disponible o debido a la solicitación magnética de los dientes) o bien de carácter económico (por ejemplo disponibilidad de una matriz de corte adecuada).
Para pequeñas máquinas de baja tensión la tendencia es utilizar las ranuras tipo 3 y 4 (semicerradas trapezoidales).
Si en cambio se trata de un alternador donde por su potencia es necesario utilizar planchuela la ranura adecuada es la tipo 1 (abierta rectangular).
Si se trata de una máquina de alta tensión construidas con bobinas preformadas y aisladas por cualquiera de los procedimientos utilizados por los distintos fabricantes, también corresponde la ranura abierta rectangular.
Cabe recordar que de la elección del tipo de ranura dependen otros aspectos de diseño como son la forma de onda de la tensión inducida (armónicas de ranura), pérdidas adicionales por pulsación de flujo etc. que deberán ser tenidos en cuenta pero que pueden ser controlados independientemente del tipo de ranura utilizada.
Se adoptan los datos que permiten determinar la geometría de la ranura del estator.
- Tipo de ranura
- Ancho de la entrada de la ranura
- Ancho de la ranura proyectada en el entrehierro
- Altura de la entrada
- Altura de la cuña (para los tipos 1 y 2) o altura del trapecio
donde el ancho de la ranura se reduce al ancho de entrada
- Altura de la aislación superior
- Espesor de la aislación
Estos datos están incluidos en el quinto registro, recordemos que todas las dimensiones se dan en mm, y cuando algunos datos son nulos el programa adoptará valores adecuados (como ocurre en otros casos).
El programa acepta sólo los siguientes tipos de ranura para el estator:
- 1. Abierta rectangular
- 2. Semicerrada rectangular
- 3. Semicerrada trapezoidal
- 4. Semicerrada trapezoidal con fondo semicircular
Para determinar la geometría de la ranura y validar los restantes datos o adoptar valores adecuados, el programa determina el paso de ranura, compara la mitad de este valor con el ancho de ranura en el entrehierro (B1), y lo acepta si se encuentra comprendido dentro de cierto rango lógico.
Además controla que dentro de la ranura quepa la correspondiente aislación contra masa.
Realizadas estas verificaciones se determinan las dimensiones características de la ranura elegida. Para tal fin se utilizan distintas rutinas que calculan los anchos aún no definidos o los verifican.
Finalmente en base a la sección bruta y al espesor de la aislación, se calculan las distintas alturas Ver Figura 169 y la profundidad de la ranura.
Rutinas adecuadas dimensionan la ranura adoptada, se imprimen las dimensiones correspondientes y se determina el coeficiente de aprovechamiento total que tiene en cuenta además la aislación contra masa considerándose que la cuña de cierre, cuando corresponde, no pertenece a la sección útil de la ranura.
Finalmente se determina el coeficiente de aprovechamiento total, y se imprimen los resultados obtenidos.
A este punto se señala que en algunos casos el dimensionamiento de las ranuras (tipos 3 y 4) exige la resolución de una ecuación de segundo grado que conduce a obtener dos soluciones, cuando éstas son reales el programa adopta la solución válida, y en caso de no encontrar una solución válida señala esta situación.
3.26 DETERMINACION DE LAS INDUCCIONES EN EL ESTATOR (PASO 4)
Se determina el ancho del diente a un tercio de la parte más estrecha, el paso en el fondo de la ranura, y el diámetro correspondiente.
Se determina la inducción a un tercio de la sección más estrecha del diente del estator, teniendo en cuenta el factor de apilado.
Con el valor de inducción en la corona estatórica se determina la altura correspondiente, el diámetro externo del paquete, y el peso del mismo (corona y dientes).
Si se observa la configuración del campo magnético en la corona del estator se nota que en correspondencia con el eje polar las líneas de flujo se separan hacia ambos lados, en cambio en correspondencia con el eje interpolar las líneas de flujo son normales a este eje.
En consecuencia se tiene flujo nulo en la sección de la corona que corresponde al eje del polo y flujo máximo en la sección correspondiente al eje interpolar.
El criterio utilizado para determinar la sección de la corona es adoptar un flujo uniforme a lo largo de la corona que se fija en cierto porcentaje (del orden de 80%) del valor máximo, con este flujo y la inducción adoptada se determina finalmente la altura de la corona.
3.27 DETERMINACION DEL FACTOR DE CARTER Y PARAMETROS DEL ESTATOR (PASO 5)
3.27.1 Reactancia del inducido
Cuando se mantiene constante la excitación y la velocidad de rotación de la máquina, y esta toma carga, se observa una variación de la tensión en bornes.
La primera causa de esta variación, respecto a la f.e.m. en vacío, se debe a la caída óhmica que se produce en cada una de las fases.
Pero los fenómenos vinculados con las acciones magnéticas de la corriente de inducido tienen una importancia mucho mayor en la determinación de esta caída.
Las corrientes del inducido producen flujos variables que solamente se concatenan con los conductores del inducido, lo cual permite concebir una reactancia de dispersión.
Además estas corrientes producen la llamada reacción de inducido, que causa una variación del flujo principal cuyo análisis dejamos para más adelante.
Los flujos dispersos que participan en la determinación de la reactancia de dispersión son los siguientes:
- A. Flujo disperso de ranura
- B. Flujo disperso a lo largo de las cabezas de bobinas
- C. Flujo disperso de entrehierro
3.27.1.1 Flujo disperso de ranura
El coeficiente de autoinducción de un circuito como el que se indica en la Figura 173 está definido por:
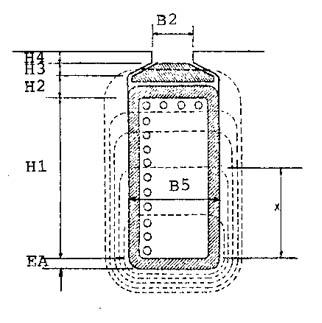
es decir está expresado por la relación entre la sumatoria de los concatenamientos del circuito con el flujo generado y la corriente unitaria. El flujo a su vez es igual a:

reemplazando se obtiene:

siendo Rx la reluctancia del circuito, que es inversa de la permeancia específica (por unidad de longitud del paquete magnético) y su valor depende de la forma de la ranura.
La fórmula es válida con gran número de conductores y en el caso que el número de conductores por ranura sea muy pequeño (al límite igual a 1), la fórmula no es más aplicable debido a que la corriente no se reparte uniformemente dentro de la barra (conductor único) y tiende a concentrarse en la parte superior (próxima al entrehierro) disminuyendo de este modo el verdadero valor de la reactancia.
La permeancia de ranura se determina partiendo de sus componentes elementales, parte con conductor y parte sin conductor.
La parte con conductor para las ranuras tipo 1, 2 y 6 (esta última no aplicable al alternador) vale:

para tipo 3 vale:
con esta fórmula se supone que el ancho del conductor es constante e igual al ancho en la parte superior, invadiendo inclusive una parte del trapecio superior.
Esta última expresión también se aplica a la parte superior de la ranura tipo 4, debiendo agregarse el término que corresponde a la parte inferior (un semicírculo) obteniéndose entonces:
Para ranura tipo 5 de barra redonda (utilizada para los circuitos amortiguadores del rotor del alternador) la expresión es:
HLC1 = 0.66
valor este que justifica el 0.33 usado para la ranura tipo 4.
Para ranura tipo 7 (no aplicable al alternador) vale:

Para la parte sin conductor valen las siguientes expresiones, en las cuales cada término corresponde a una parte de la ranura.
-
Para ranura tipo 1:

-
Para ranuras tipos 2 ó 6:

-
Para ranuras tipos 3, 4 ó 7:

siendo:
HTRA= la altura del trapecio sin conductor (HH3+HH2-HH7)

Por último para la tipo 5:

Hasta ahora hemos conducido el cálculo como si se tratase de un arrollamiento a estrato único.
Los cálculos prácticos de la reactancia de los arrollamientos a doble estrato es conveniente realizarlos como si fuesen a simple estrato y tener en cuenta la inducción mutua de ambos estratos mediante un adecuado factor de corrección.
Este factor para la parte de la ranura que aloja los conductores lo denominaremos HKQ y para la parte restante HKT.
Ambos factores dependen del acortamiento de paso utilizado y se indican en la Figura 174.
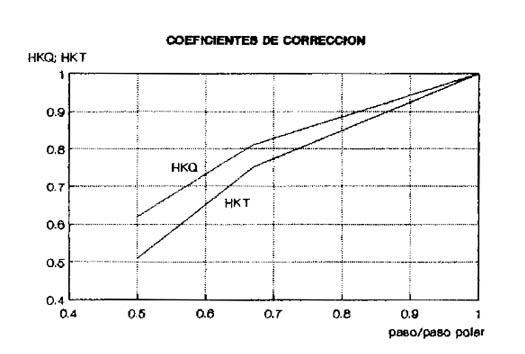
Para el caso que estamos considerando la permeancia por unidad de longitud es:
HLC3 = HLC1 ´ HKQ + HLC2 ´ HKT
Para determinar la reactancia de dispersión de ranura con el método propuesto como se parte de valores específicos es necesario dar correctamente la longitud del circuito de dispersión.
El valor que debe utilizarse no es el largo total del núcleo, ni tampoco el largo que hemos denominado ideal, ni el solo largo del hierro, la longitud a utilizar debe tener en cuenta la influencia que los canales radiales de ventilación tienen en esta parte del circuito de dispersión.
En forma similar a como se obtiene la longitud efectiva o largo ideal se procede para determinar una longitud que se utiliza para esta parte del cálculo y que se determina descontando al largo total del núcleo el producto del número de canales de ventilación por su ancho equivalente, que en este caso es función del ancho de la ranura (caras paralelas) o bien del ancho BB4 a la altura del diente (ranuras trapezoidales) y del ancho real de los canales de ventilación.
La reactancia de dispersión de ranura es:

donde el valor HLD corresponde al largo antes definido, todas las dimensiones están dadas en milímetros y el valor de la reactancia se obtiene en ohm.
3.27.1.2 Flujo disperso de cabezas de bobinas
Para determinar la dispersión de la cabeza de bobina estatórica se necesita conocer en detalle su geometría, en esta etapa de anteproyecto se considera conveniente adoptar un método simplificado, sacrificando la flexibilidad (aplicabilidad a distintas formas constructivas) en aras de una mayor claridad didáctica.
Para determinar la geometría de cabeza de bobina se utiliza el siguiente procedimiento.
En función de la tensión se determina la parte recta fuera del paquete (HRB), esta distancia se estima en 15 mm para 380 V y 40 mm para 1000 V.
A continuación se determina el paso medio de ranura para la mitad de la profundidad de la ranura (H6).
Se determina la distancia que debe haber entre los costados de cabezas de bobina (en función de la tensión) mediante la Figura 175.
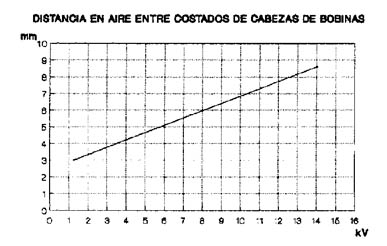
Se determina la distancia entre ejes de bobina (DCB) agregándole a la anterior el ancho medio de bobina.
Para que la cabeza de bobina pueda ser construida es necesario que la distancia entre ejes de costado de bobina DCB sea mayor o igual a una cierta fracción del paso medio de ranura PCM.
Por ejemplo si el ángulo de inclinación de la cabeza de bobina respecto del paquete magnético es 50 grados la relación DCB/PCM sería aproximadamente 0.75, se considera que este ángulo no debe superarse para poder realizar la construcción.
La Figura 176 muestra la geometría esquemática de las cabezas de bobina y partiendo de los valores fijados se determina DEN2 y EME completando todas las relaciones geométricas, que permiten entonces calcular la dispersión de cabeza de bobina.
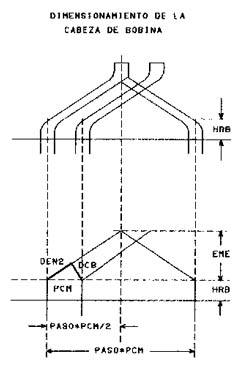
En función de la tensión nominal de la máquina se obtiene de la Figura 177 un factor de dimensionamiento (FD) que multiplicado por el paso polar permite determinar la longitud aproximada de la cabeza de bobina (HLA) que se utiliza para determinar el peso.
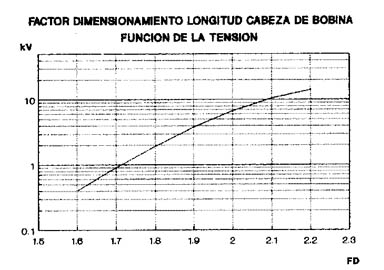
Se calcula la permeancia de esta parte mediante:

siendo:
HLA: longitud media de la cabeza en (mm)
HK(3): factor de acortamiento
La reactancia de dispersión de cabeza se calcula con:

La trayectoria del flujo disperso alrededor de los conductores que forman las cabezas de bobinas está influenciada por la presencia de los escudos o tapas porta cojinetes de la máquina (que pueden ser de material magnético) modificando sensiblemente su distribución.
Además debido a que las cabezas de bobinas correspondientes a fases distintas están recorridas por corrientes de fase y amplitud diferentes, y normalmente cercanas entre sí, no se puede prescindir de los efectos de inducción mutua.
Por consiguiente el cálculo de la dispersión de esta parte sólo se puede realizar de un modo aproximado, siendo necesario para una mayor exactitud la realización de mediciones experimentales que no siempre son fácilmente realizables.
3.27.1.3 Flujo disperso de entrehierro
En las máquinas con entrehierro grande (como son los alternadores) se deben tener en cuenta las líneas de dispersión que se establecen entre las cabezas de los dientes cerrándose por el aire.
Cuando el entrehierro es variable, no se tiene en cuenta su aumento desde el eje del polo hacia los extremos de la expansión polar, debido a que la permeancia aumenta poco con la longitud de entrehierro.
Además la permeancia se multiplica por la relación BTAUP, excluyéndose de este modo las ranuras ubicadas en la zona interpolar.
Distintos autores proponen métodos que basándose en algunas hipótesis simplificativas permiten calcular de un modo aproximado estos flujos de dispersión.
La permeancia de cabeza de dientes se calcula para máquinas de polos salientes mediante:
donde:
DELTA : entrehierro mínimo (en el eje del polo) en mm
La reactancia de dispersión de entrehierro se calcula con:

donde HLI es el largo ideal definido al inicio del cálculo.
La reactancia de dispersión total por fase es igual a la suma de las tres antes detalladas
X = Xc + Xt + Xb ohm
Algunos autores proponen fórmulas aproximadas que sirven para calcular la reactancia de dispersión total de un arrollamiento.
Estas expresiones aproximadas no tienen en cuenta en el cálculo la forma de la ranura (son aplicables para ranuras semicerradas). Si se las utiliza para ranuras abiertas el valor de reactancia obtenido es de un 5 a 10% mayor que el que se obtendría utilizando el método de cálculo aquí propuesto.
3.27.1.4 Factor de Carter
La disminución de la permeancia magnética en correspondencia con la ranura hace que el valor de la inducción que se tiene en el entrehierro resulte menor que el que se tiene en correspondencia con la cabeza del diente.
Frente a la ranura la curva de la inducción experimenta una disminución de amplitud variable con ley sinusoidal.
Para tener en cuenta esta situación se utiliza en los cálculos un factor (siempre mayor que 1) llamado factor de Carter (que fue quien lo calculó por primera vez) que introduce para los cálculos en lugar del entrehierro real un entrehierro ficticio que resulta igual al producto del factor de Carter (FCAR) por el entrehierro (DELTA).
Este factor depende de la relación entre la apertura de la ranura y su paso (B2/TAUC), es decir, depende del tipo de ranura utilizada, y además de la relación entre la apertura de la ranura y el entrehierro (B2/DELTA).
Se determina el factor de Carter para el estator, luego se determinan las permeancias especificas de ranura y calcula la permeancia de la misma.
La permeancia de cabeza de dientes se determina con una fórmula válida para la máquina sincrónica y se calcula la permeancia de dispersión de entrehierro.
Se describe la geometría de la bobina, los resultados obtenidos permiten calcular la dispersión de cabeza de bobina.
Se calculan la resistencia y reactancia de fase y los valores correspondientes de la estrella equivalente.
3.28 DIMENSIONAMIENTO DEL INDUCTOR (PASO 6)
Para poder dimensionar el inductor es necesario previamente determinar el diámetro del eje en el núcleo del rotor para conocer cual es el espacio que queda disponible para el polo y la corona polar.
El cálculo de los ejes y gorrones de las máquinas eléctricas se efectúa utilizando los mismos criterios que para la construcción general de máquinas. Sin embargo, no solamente se deben tener en cuenta los esfuerzos mecánicos (de flexión y torsión) que actúan sobre dichos órganos, las condiciones de calentamiento y de lubricación de los cojinetes y la velocidad crítica, sino también muy particularmente la flecha del eje.
Debido al entrehierro relativamente exiguo entre el inducido y las piezas polares, una deformación del eje demasiado pronunciada trae consigo, en máquinas multipolares, asimetrías en los distintos circuitos magnéticos que producen una tracción magnética unilateral.
Para simplificar el cálculo de los ejes se pueden utilizar expresiones empíricas (distintas según el tipo de máquina) que para construcciones normales dan valores suficientemente exactos para el diámetro del eje en el núcleo del rotor o en el asiento del inducido.
Para el alternador la siguiente fórmula permite estimar este diámetro:

Para todo eje cargado por el correspondiente rotor existe una velocidad crítica, que corresponde a la coincidencia del período propio de vibración transversal del eje con los impulsos producidos por la fuerza centrífuga.
Para que un sistema, incluso perfectamente equilibrado, funcione lejos de la posibilidad de vibraciones intolerables y peligros de resonancia, su velocidad crítica debe ser diferente a la velocidad de régimen.
En general es suficiente una diferencia de 20% entre las dos velocidades y preferiblemente que la velocidad de régimen se encuentre por debajo de la velocidad crítica.
Se calcula el radio de curvatura de la expansión polar teniendo en cuenta si el entrehierro es de tipo constante o variable.
Si es constante el cálculo del radio de curvatura es inmediato, si es variable (con ley sinusoidal) se lo hace con:
siendo:
Se deben adoptar los siguientes valores para avanzar en el cálculo:
- Relación de alturas del extremo de la expansión polar a la semicuerda de la expansión.
- Relación flujo disperso a flujo útil.
- Inducción en el cuello del polo.
- Relación altura del cuello al ancho del polo.
- Inducción en la corona polar.
Para asignar el valor del flujo disperso (líneas de campo que se cierran entre dos polos contiguos) es necesario representar la configuración del campo.
Para máquinas normales y con una relación BTAUP = 2/3 se puede suponer que el flujo disperso es aproximadamente un 20% del flujo útil.
Para el dimensionamiento de la expansión polar, se debe recordar que, normalmente, se debe prever el espacio para las barras amortiguadoras, cuyo diseño veremos más adelante, adoptándose para ello la relación entre la altura de la expansión polar y su semicuerda BPP/APP = 0.2.
El valor de la inducción máxima en el cuello del polo y en la corona polar como así también en las restantes partes del circuito magnético, son función de las condiciones de funcionamiento de la máquina.
Para frecuencia de 50 Hz en condiciones de sobreexcitación (cos j = 0.7) y funcionamiento en vacío a la tensión nominal se pueden adoptar los siguientes valores:
- Cuello del polo 1.3 a 1.7 T
- Corona polar 1.2 a 1.4 T
los valores indicados son válidos para chapa normal (SAE 1010) o acero fundido.
La relación altura del cuello al ancho del polo se adopta igual a 1.5 que da una proporción aceptable. Claro está que se deberá compatibilizar esta relación con otros aspectos vinculados con el diseño de la corona del inductor y con el eventual espacio disponible para el devanado de excitación.
Con las relaciones adoptadas y la inducción en el cuello del polo se determina la geometría del mismo, es decir, dimensiones de la expansión polar, ancho y altura del cuello del polo, según muestra la Figura 178.
Con un razonamiento geométrico, en base a las dimensiones ya determinadas y a la relación altura del cuello ancho del polo, se calcula la altura que queda disponible para la corona.
Por otra parte se determina esta altura respetando el valor de la inducción en la corona polar, debiendo este valor ser compatible con el obtenido anteriormente.
Si la condición magnética no otorga una altura adecuada, el programa reduce sucesivamente la relación altura del cuello ancho y rehace los cálculos anteriores.
Además se controla que no haya interferencias en la base del cuello polar (que quede espacio para las distintas partes del inductor), en caso de haberla se procede en modo análogo a lo indicado en el párrafo anterior.
En rigor puede no obtenerse solución a estos problemas, el programa señala la situación.
3.29 CARACTERISTICAS MAGNETICAS (PASO 7)
Se deben conocer las características del hierro adoptado para la construcción.
Estas se dan como relación entre los valores de inducción y las pérdidas específicas, y relación entre los valores de inducción y la correspondiente intensidad de campo (característica magnética).
Estos datos deben conocerse tanto para el material utilizado en el estator, como para el material utilizado en el rotor.
Otros datos necesarios son:
- Coeficiente de reacción de armadura.
- Frecuencia de referencia de la característica inducción pérdidas del material del estator.
- Exponente de la característica anterior.
- Pérdidas de ventilación.
- Factor de aumento de las pérdidas en el hierro.
- Pérdidas adicionales.
Se controla la validez de los datos magnéticos introducidos y eventualmente se los reemplaza por los que el programa contiene.
Se determina para el valor de tensión 1 por unidad la intensidad de campo en el estator y en el rotor (corona estatórica, diente, cuello del polo, corona rotórica, y el entrehierro) y la fuerza magnetomotriz total.
Se determinan las pérdidas en la corona del estator y en los dientes, y se las corrige teniendo en cuenta la frecuencia y el factor de aumento de pérdidas.
3.30 DETERMINACION DE LA CARACTERISTICA DE VACIO (PASO 8)
Con los valores de la tensión nominal en bornes, de la corriente nominal en magnitud y fase, de la resistencia y reactancia de dispersión y la f.m.m. de reacción del inducido reducida al inductor, se debe determinar la f.m.m. total de excitación necesaria.
Para ello se requiere determinar además la característica de vacío de la máquina.
Cabe recordar que debido a que estamos proyectando una máquina de polos salientes (anisótropa), se debe utilizar la teoría de la doble reacción de Blondel, sin embargo el método de Potier, conceptualmente válido para máquinas de polos lisos (isótropas) puede ser utilizado para mayor simplicidad y con un error de magnitud reducida.
Para máquinas de polos salientes este último método da un valor de f.m.m. resultante del orden de un 10% mayor que el de Blondel, lo cual concede al proyectista un margen de seguridad en la determinación de esta magnitud.
Recordemos que siempre se presentan apartamientos entre los resultados del cálculo y las características reales de la máquina construida por razones tanto debidas al método de cálculo como por tolerancias de fabricación.
Al utilizar el método de Potier no resulta en cambio correcta la fase de la f.e.m. EH que se indica en la Figura 179, es decir no está exactamente definida la posición instantánea del rotor que resulta de utilidad para el estudio de problemas vinculados con la estabilidad de funcionamiento.
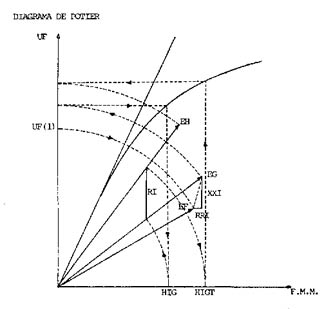
Queda a criterio del proyectista en función de los requerimientos impuestos, evaluar la necesidad de utilizar el método de Blondel cuando lo juzgue necesario para mejorar los resultados.
La rutina EXCITA desarrolla la tabla de la característica de vacío para una serie de valores de la tensión.
Se cubre un campo de valores que dado en por unidad de la tensión nominal, es de suficiente amplitud para mostrar la parte de la característica donde se observan los efectos de saturación.
Sucesivamente la rutina GRAFI9 grafica estos resultados, en particular la característica magnética completa y la característica del entrehierro solamente.
3.31 FUERZA MAGNETOMOTRIZ DE REACCION
Supongamos que la carga del alternador es totalmente inductiva o capacitiva, razón por la cual la curva de f.m.m. del inducido presenta su valor máximo en correspondencia con el centro del polo.
En un alternador de polos salientes la curva de f.m.m. del inductor es constante frente a la expansión polar, mientras que la curva de f.m.m. del inducido varía de modo tal que se puede considerar sinusoidal.
Se puede determinar en consecuencia el valor medio de esta f.m.m. de inducido frente a la expansión polar que, como resulta obvio, depende de la relación entre la longitud de la expansión polar y el paso polar (BETAUP), y que para una relación 2/3 normalmente utilizada vale 0.826.
A este punto recordemos que la f.m.m. generada por el inducido tiene en cualquier instante un valor máximo practicamente constante y que con distribución próxima a una sinusoide, se desplaza a lo largo del entrehierro con velocidad angular sincrónica.
Al producto de la amplitud de la f.m.m. de reacción de inducido 1.35 (se considera solamente la fundamental) por el valor medio antes calculado y por el factor de distribución (se adopta HK2=0.96), que tiene en cuenta que se trata de un devanado con un número de ranuras por polo y fase mayor que 1, se lo designa coeficiente de reacción de armadura (CRI) y se indica en la Figura 200 para distintos valores de la relación BETAUP.
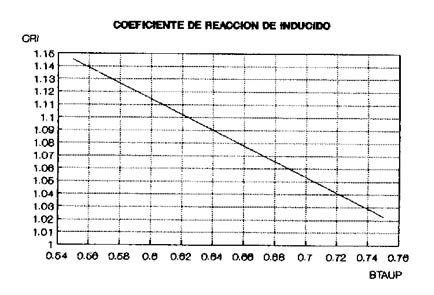
La f.m.m. de reacción de inducido reducida al inductor (que es lo que interesa para el cálculo) se determina con:
RI = CRI ´ CAC ´ CORR ´ QPF ´ HK3
donde:
- CAC : número de conductores activos por ranura
- CORR: corriente de fase
- QPF : ranuras por polo y por fase
- HK3 : factor de acortamiento
Si el valor del coeficiente de reacción de armadura no ha sido impuesto como dato, se lo determina en base a la relación entre en largo de la expansión polar y el paso polar, y finalmente calcula la reacción de armadura.
Sucesivamente se determinan todos los valores que permiten realizar la construcción de POTIER, se determinan los amper vueltas necesarios en el inductor para las condiciones nominales.
3.32 DETERMINACION DEL DEVANADO DEL POLO INDUCTOR (PASO 9)
En las máquinas con bajo número de polos normalmente el espacio disponible para el arrollamiento de excitación resulta limitado y para lograr un mayor aprovechamiento la bobina se realiza con sección no rectangular.
Si el arrollamiento se realiza con conductor redondo la sección de la bobina puede adoptar la forma indicada en la Figura 201A, en cambio si se lo realiza con planchuela la sección del bobinado puede tener un contorno escalonado según se indica en la Figura 201B.
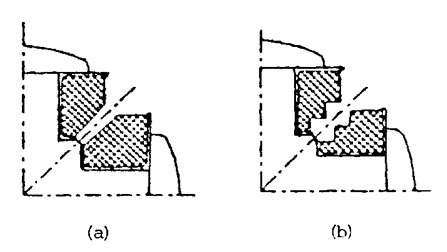
Cuando se desea obtener una buena refrigeración de la bobina estos arrollamientos se realizan según se indica en la Figura 202.
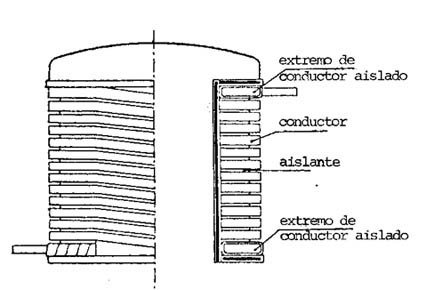
Los conductores de cobre desnudos están aislados solamente contra el polo y entre si utilizando para ello adecuados materiales aislantes (por ejemplo nomex) lográndose de este modo que el calor que se produce debido a las pérdidas por efecto Joule sea facilmente entregado al fluido refrigerante.
Esta forma constructiva se adopta particularmente en máquinas de baja polaridad (espacio limitado), permitiendo adoptar valores de densidad de corriente bastante elevados.
Como se puede observar comparando las figuras la utilización del espacio disponible realizando el devanado con sección rectangular es menor que si el mismo fuese de sección no rectangular, pero la primera es preferible pues presenta la ventaja de una mejor refrigeración.
Si la máquina tiene un número de polos elevado (hidrogeneradores) el espacio disponible para el arrollamiento resulta siempre abundante, pero también la sección del conductor resulta muy grande, y el arrollamiento se lo realiza del modo ya visto en la Figura 202.
Las secciones rectangulares de los conductores tienen el lado mayor (b) comprendido normalmente entre 20 y 70 mm, y el plegado en los extremos del devanado se puede realizar con un radio interior (r) que resulta como mínimo igual a la dimensión b de la planchuela siempre que su lado menor (s) sea mayor o igual a (0.5 + b/100) mm.
Para el dimensionamiento del devanado del inductor se deben adoptar una serie de parámetros que están vinculados con el tipo de diseño que se piensa utilizar.
Estos datos son los siguientes:
- Tensión por polo
- Densidad de corriente en el arrollamiento
- Coeficiente de aprovechamiento
- Resistividad del conductor (a la temperatura que se presume alcanzar en condiciones de régimen)
- Peso específico del conductor
- Espesor de la aislación del devanado contra masa
En el programa el cálculo se conduce en principio independientemente del tipo de diseño adoptado, de la forma que se indica a continuación.
De acuerdo con la nomenclatura que indica la Figura 203 se calcula la sección teórica disponible de la siguiente manera:
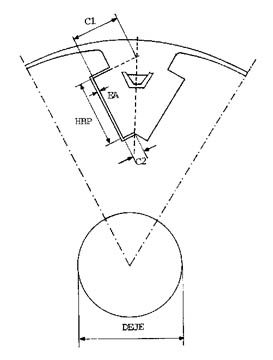
SBP = HBP ´ EBP (mm²)
donde:

Se calcula la sección total neta ocupada por los conductores del devanado que es igual a la f.m.m. por polo dividido la densidad de corriente adoptada:
Se calcula la sección total necesaria que es igual a la sección neta dividido el coeficiente de aprovechamiento (función del diseño que se adopte):
A este punto se debe controlar si la sección necesaria cabe dentro de la sección teórica disponible, y de no ser así se debe incrementar la densidad de corriente para lograr esta condición.
Si se presenta esta condición el programa hace la sección bruta igual a la disponible y lo pone de manifiesto, en las sucesivas corridas se debe decidir que acciones realizar para mejorar el diseño.
Como consecuencia de los esfuerzos centrífugos a que se ven sometidos los arrollamientos en funcionamiento, se deben utilizar elementos de sujeción que garanticen su indeformabilidad y que se indican en la Figura 204.
El efecto de la fuerza centrífuga sobre las bobinas es diferente según se trate de polos pequeños sobre rotores de gran diámetro o bien de polos grandes en relación con el diámetro de la corona polar.
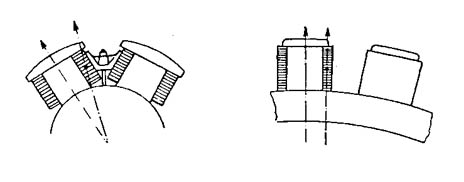
En el primer caso la fuerza centrífuga empuja a la bobina en la dirección del polo contra la expansión polar, en el segundo caso la bobina tiende además a deshacerse y separarse lateralmente según indica la Figura 204.
Cabe agregar que cuando se calcula la sección teórica disponible no se tiene en cuenta el lugar que ocupan los elementos de sujeción antes indicados.
Se calcula la sección del conductor del devanado con la expresión:

donde la espira media del devanado de excitación ESPM se puede calcular con las dimensiones del inductor ya obtenidas, el programa propone un valor aproximado que depende de la relación entre la sección bruta y la disponible.
Se calcula a continuación la corriente de excitación que resulta igual al producto de la sección del conductor por la densidad de corriente:
CEXC = SC(2) ´ DENC(2) (A)
Si se dispone de experiencia previa se puede estimar un valor aproximado de la temperatura media que alcanzará el devanado y utilizar en los cálculos el valor de resistividad correspondiente.
Si no se dispone de experiencia previa en tal sentido se recomienda realizar, para el diseño definitivamente adoptado, un cálculo térmico que permite en función de la geometría del polo, del devanado, y de los materiales utilizados para la aislación entre espiras y contra masa, obtener valores teóricos (que deberán verificarse experimentalmente) y que sirven de orientación para efectuar eventuales correcciones de esta parte del cálculo.
De no ser así se pueden cometer errores significativos en la determinación de la corriente de excitación, para la condición de funcionamiento permanente, con las consecuencias que ello implica.
Se calcula el número de espiras necesarias que es igual a la f.m.m. por polo dividido la corriente de excitación:

Por último se calcula la resistencia del devanado:

y las pérdidas Joule de excitación totales que resultan:

Es importante destacar que luego se debe proceder a verificar si efectivamente con los datos obtenidos el devanado del inductor es realizable, y en caso de que así no fuese adoptar las modificaciones, tanto de diseño como de los parámetros iniciales, que permitan reconducir el cálculo.
Se determina el diámetro correspondiente en la base del cuello del polo, que se utiliza para determinar la distancia entre el cuello polar y el eje interpolar, y a éste se le descuenta la aislación contra masa.
Se realiza la misma operación pero al nivel de la expansión polar.
A continuación se determina la altura útil del cuello del polo.
Con un criterio muy simplificado se determina el valor medio de las distancias antes calculadas y la sección disponible para el devanado.
3.33 ARROLLAMIENTOS AMORTIGUADORES
En las expansiones polares (polos salientes) se disponen los arrollamientos amortiguadores.
Las expansiones polares cuando tienen arrollamientos amortiguadores, se deben construir con chapas magnéticas aisladas, para que efectivamente las corrientes amortiguadoras se establezcan en los arrollamientos amortiguadores propiamente dichos y no en los polos.
Las secciones de los arrollamientos amortiguadores deben ser suficientemente proporcionadas para que no se produzcan calentamientos excesivos.
Para que el arrollamiento amortiguador resulte efectivo, debe ser pequeño el flujo disperso correspondiente.
Para ello las barras amortiguadoras deben colocarse muy próximas a la superficie polar, es decir, estar separadas de la superficie por un istmo de material magnético de 0.5 a 1 mm de espesor.
Para reducir el flujo disperso es conveniente que este istmo esté interrumpido (ranura semicerrada), de este modo si los pasos de ranura del inducido y del inductor son iguales, aumenta la amplitud de las armónicas de la f.e.m. debida a los dientes.
En este caso es conveniente, como ya se dijo oportunamente, inclinar el polo a lo largo de todo el paquete en un paso de ranura.
Si las barras amortiguadoras y las ranuras del inducido son paralelas, es conveniente que el paso entre dos barras consecutivas sea igual al paso de ranura del inducido. De este modo las pulsaciones de flujo debidas a los dientes no inducen f.e.m. en el circuito formado por dos barras consecutivas (flujo concatenado nulo).
Si en cambio los pasos de ranura del inducido e inductor son distintos, el circuito formado por dos barras consecutivas es sede de f.e.m. inducida que amortigua la pulsación misma (causa que la genera) pero produce un importante calentamiento del arrollamiento amortiguador.
Si el arrollamiento amortiguador tiene por finalidad ser utilizado como arrollamiento de arranque, para evitar dificultades durante el arranque no debe presentarse igualdad de pasos de ranura entre inducido e inductor.
Para esto el paso del arrollamiento amortiguador se hace un 10 a 15% mayor que el paso ranura del inducido.
En consecuencia se tienen corrientes parásitas producidas por el flujo debido a los dientes pero su efecto es limitado.
Si en cambio el arrollamiento amortiguador se inclina un paso ranura del inducido, el paso de las barras amortiguadoras puede ser elegido libremente.
El número de barras del arrollamiento amortiguador está normalmente comprendido entre 5 a 10 barras por polo.
La sección de la barra es circular, y el área total de las barras, si se utiliza cobre, es del orden del 30% de la sección total de conductores del inducido.
Cuando se desea un mayor efecto de amortiguamiento la relación de secciones puede llegar a ser del 60%.
Si el arrollamiento amortiguador sirve para el arranque es necesaria una mayor resistencia, para tener un par de arranque adecuado, la relación dada anteriormente se reduce hasta un 10% (siempre que se utilice cobre).
En estas condiciones para facilitar la disipación del calor en ellas desarrollado, es más conveniente realizar las barras de bronce debido a que para mantener el mismo valor de resistencia de la barra la sección debe ser más grande.
La sección de las conexiones frontales de las barras (anillos de la jaula) es normalmente igual a la mitad de la sección total de las barras de un polo.
Si por razones de diseño se desea aumentar la resistencia de la jaula, es conveniente aumentar la resistencia de los anillos que se encuentran en condiciones más favorables de refrigeración, y puede reducirse hasta un 20% de la sección total de barras por polo.
Si la máquina es monofásica se debe tener en cuenta que la jaula debe amortiguar el campo inverso en forma continua.
En este caso el cálculo de las secciones de las barras y de los anillos se realiza adoptando valores de densidad de corriente del orden de 5 a 8 A/mm² si se utiliza cobre.
3.34 DETERMINACION DE LAS PERDIDAS
Finalmente se determinan las pérdidas de excitación, las pérdidas en carga del devanado estatórico, las pérdidas mecánicas y de ventilación (si no fueron entradas como dato), a todas éstas se le suman las pérdidas en el hierro del estator.
3.34.1 Pérdidas mecánicas y de ventilación
Las pérdidas de ventilación (rozamiento con el aire) corresponden a la potencia necesaria para obtener una ventilación suficiente para disipar el calor producido por las pérdidas presentes en la máquina, en condiciones normales de funcionamiento.
Estas pérdidas no se pueden calcular por medio de fórmulas generales, debido a la gran variedad de formas constructivas y tipos de ventilación, es decir, debido al gran número de elementos que intervienen para definir su valor.
Las pérdidas por rozamiento en los cojinetes se pueden considerar proporcionales a la velocidad, al menos mientras éstas no resulten de valor muy pequeño.
Para evaluar estas pérdidas es conveniente referirse a construcciones similares o bien utilizar una expresión empírica que permita estimarlas en forma aproximada.
Las pérdidas mecánicas, es decir, las pérdidas de rozamiento más las de ventilación se pueden determinar con la siguiente expresión:

3.34.2 Pérdidas adicionales
Las pérdidas adicionales son aquellas que no son fácilmente calculables, pueden subdividirse en dos grupos según que dependan de la tensión o de la corriente.
Al primer grupo pertenecen las pérdidas superficiales y de pulsación, las producidas por un aislamiento imperfecto entre las chapas que constituyen la estructura magnética, por la presencia de rebabas y las producidas en la juntas (flujo que atraviesa partes de notable espesor según una dirección transversal).
Estas pérdidas pueden ser tenidas en cuenta mediante oportunos factores de corrección referidos a las pérdidas principales (tiene aquí notable importancia la experiencia que el fabricante posee de construcciones similares), y pueden determinarse simplemente con mediciones realizadas en vacío.
Las pérdidas adicionales dependientes de la carga pueden determinarse experimentalmente en muy pocos casos (por ejemplo en las máquinas sincrónicas), generalmente se pueden determinar sólo indirectamente, por ejemplo en base al calentamiento.
Estas pérdidas pueden estar presentes tanto en el hierro como en el conductor activo, como así también en las partes estructurales.
Algunas de estas pérdidas (por ejemplo las pérdidas por concentración de corriente en un conductor, las pérdidas superficiales y de pulsación en los dientes causados por la fuerza magneto motriz), son calculables dentro de ciertos límites.
Otras resultan difícilmente calculables por la complejidad que depende de la forma de los arrollamientos y de las partes metálicas macizas que constituyen ciertos componentes de la máquina.
El estudio de los campos magnéticos que se producen en las zonas afectadas por los flujos dispersos puede suministrar indicaciones útiles para la adopción de adecuados recursos que permitan limitarlas.
En particular se trata de reducir la intensidad de los campos cercanos a partes macizas utilizando materiales no magnéticos.
Como dicho las pérdidas adicionales dependientes de la tensión se las puede evaluar mediante mediciones realizadas en vacío, en la práctica se denominan pérdidas adicionales solamente a las pérdidas dependientes de la corriente.
Las pérdidas adicionales pueden entrarse como dato, de no ser así el programa las evalúa como un porcentaje de la suma de pérdidas anteriormente realizada.
Para la determinación de las pérdidas adicionales, correspondientes a la corriente y frecuencia nominales, se procede del mismo modo como para la determinación de las pérdidas en el hierro, pero con la máquina cortocircuitada y con la excitación necesaria para que circule la corriente nominal.
Las pérdidas adicionales se obtienen como diferencia entre la potencia entregada en el eje menos las pérdidas mecánicas, pérdidas de excitación (si la misma no es independiente) y las pérdidas óhmicas calculadas para la temperatura alcanzada por los arrollamientos en el momento del ensayo.
Obtenidas las pérdidas totales se determina el rendimiento con lo cual se finaliza el cálculo.
3.35 BIBLIOGRAFIA MAQUINAS ROTANTES Y ALTERNADOR
- PUBLICACION IEC 34-1 (1983) Part 1: Rating and perfomance.
- PUBLICACION IEC 34-2 (1972) Part 2: Methods for determining losses and efficiency of rotating electrical machinery from test.
- PUBLICACION IEC 34-5 (1981) Part 5: Classifications of degrees of protection provided by enclosures for rotating machines.
- PUBLICACION IEC 34-6 (1969) Part 6: Methods of cooling rotating machinery.
- PUBLICACION IEC 34-7 (1972) Part 7: Symbols for types of construction and mounting arrangements of rotating electrical machinery.
- PUBLICACION IEC 34-8 (1972) Part 8: Terminal markings and direction of rotation of rotating machines.
- PUBLICACION IEC 72 (1971) Dimensions and output ratings for rotating electrical machines - Frame numbers 56 to 400 and flange numbers F55 to F1080.
- U. TENTORI "Cálculo y Construcción de las máquinas eléctricas" ATLAS C.E.I. - U.B.A. (1969).
- M. LIWSCHITZ "Calcolo e determinazione delle dimensioni delle macchine elettriche" ULRICO HOEPLI-MILANO.
- CARRER "MACCHINE ELETTRICHE" Parte terza MACCHINE SINCRONE - LEVROTTO BELLA - TORINO.
- REBORA "La construcción de máquinas eléctricas" HOEPLI - BARCELONA (1969).
- SOMEDA "Elementi di costruzione delle macchine elettriche" R. PATRON - BOLOGNA.
- SCHUISKY "Calcolo delle macchine elettriche" CASA EDITRICE AMBROSIANA - MILANO.
- "Manual de instrucciones y mantenimiento para generadores sincrónicos medianos" (1964).
- AEG "Descripción técnica de generadores sincrónicos de polos salientes, Tipo S" 1204.608 E E 17/0567.
- TOSHIBA "Salient-pole high-speed synchronous motor" KSA-E22003(2R) 1983-3.
- ANSALDO "Generatori sincroni trifasi senza spazzole" Catalogo C 1216 (1979).
- ANSALDO "Generatori e motori sincroni" C-1670 (1977).
- BROWN BOVERI REVIEW 2-80.
- Revista A.B.B. 1/89.

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML