



Advanced
Cable Testing
CALCULO Y DISEÑO DE MAQUINAS ELECTRICAS
CAPITULO 18 - REACTANCIAS Y CONSTANTES DE TIEMPO DE LAS MAQUINAS SINCRONICAS
LA DINAMICA DE LAS MAQUINAS SINCRONICAS Y ASINCRONICAS
Antecedentes
En los cursos de Sistemas de Potencia se habla de las reactancias funcionales, y se las utiliza, también se explican sus significados, pero siempre con un enfoque de sistemas. Surge natural en un curso de construcción de máquinas eléctricas la pregunta: ¿cuánto valen los parámetros de la máquina sincrónica si...? buscamos respuesta en los libros de construcción de máquinas clásicos más fácilmente accesibles.
Algunos de estos libros nada dicen sobre el tema, otros dicen poco... cayó en nuestras manos un interesante artículo publicado en una revista Marelli de fines de 1962, - G. di Vito - Considerazioni sulle reattanze delle macchine sincrone.
Este autor, perteneciendo al grupo de los que piensan como fabricantes de máquinas, logra un buen nexo con quienes ven en la máquina simplemente un modelo circuital que les ayuda a razonar correctamente y prever las condiciones de funcionamiento del sistema.
Sobre la base de este artículo, extrayendo de él los conceptos más sobresalientes y más profundos, hemos preparado la traza de este trabajo, con esta imagen conceptual luego hemos accedido a la bibliografía de donde hemos obtenido los algoritmos de cálculo completando y satisfaciendo nuestro objetivo.
Es deber reconocer que el factor desencadenante de este trabajo fue el artículo citado que es de claridad extraordinaria que esperamos no haber empañado con nuestra parcial traducción.
La reactancia de dispersión de inducido
Esta es la reactancia por antonomasia de las máquinas sincrónicas, se la utiliza en la construcción de Blondel y de Potier, para determinar la corriente de excitación en carga y las variaciones de tensión, como así también para determinar la amplitud máxima de la corriente transitoria de cortocircuito o la corriente de arranque de los motores sincrónicos.
Es cierto que esta reactancia presentaba algunos inconvenientes y en general conducía a corrientes de cortocircuito netamente superiores a aquellas que después se encontraban en la realidad.
Muchos aceptaban como compromiso adoptar, en vez de la reactancia correspondiente a la efectiva dispersión de inducido, aquella medida con el rotor extraído, utilizando fórmulas semiempíricas que conducían a resultados notablemente aproximados.
Como siempre ocurre, con el continuo desarrollo de la técnica surgieron nuevos problemas y se agravaron otros que parecían despreciables; en también en este campo lo que por muchos años había satisfecho las exigencias de los técnicos, resultó insuficiente, y surgió la necesidad de un más completo conocimiento de las máquinas sincrónicas.
En particular el creciente empleo y desarrollo de hornos eléctricos monofásicos y de otras cargas monofásicas, hizo necesario conocer como reaccionan las máquinas sincrónicas con cargas desequilibradas; la puesta a tierra del neutro requirió la determinación de las corrientes de cortocircuito en el caso de una o más fases a tierra; la utilización de máquinas de potencia mayor y las fuertes concentraciones de potencia han requerido una más cuidadosa determinación de las corrientes de cortocircuito; finalmente el creciente aumento de la potencia transmitida, la mayor longitud de las líneas de transmisión y las interconexiones, han requerido conocer el comportamiento de las máquinas sincrónicas con relación a la estabilidad.
En efecto todas las reactancias de las máquinas sincrónicas son un indispensable auxilio para el ingeniero de sistemas, para el cual es necesario poder determinar como reacciona la máquina sincrónica en las varias condiciones de funcionamiento, normales y anormales, a las cuales puede ser sometida; este es esencialmente un problema de naturaleza física.
Para él las máquinas sincrónicas no existen como tales, es decir ve en lugar de cada una de ellas un cierto número de reactancias y tal vez de resistencias, que según los casos se presentan solas o combinadas entre sí. Esta visión que a algunos puede parecer abstracta, encuentra finalmente una realización concreta en los modelos de redes, en los cuales las máquinas sincrónicas, como cualquier otro componente de la red, se simulan con una combinación de reactancias y resistencias (como modelos físicos, o numéricos).
Muy distinto es el punto de vista del proyectista o constructor de las máquinas. A estos el comportamiento de la máquinas en las distintas condiciones de funcionamiento les interesa bastante poco y se podría decir que no interesa para nada si se excluyen algunas necesarias verificaciones. El problema frente al cual el proyectista se encuentra no es de naturaleza física sino geométrica. El estudio del circuito magnético, de los arrollamientos, del mismo circuito de ventilación, finalmente el cálculo de las reactancias, son todos problemas de naturaleza geométrica. Y la individualización de las máquinas sincrónicas a través de un cierto número de reactancias se le presenta necesariamente artificioso y no natural.
Además al proyectista la separación de los efectos de la corriente de inducido en amperespiras de reacción y dispersión del inducido se presenta como una solución ampliamente racional y ventajosa y más aún no logra concebir otra.
El objeto principal de la actividad y de los estudios del ingeniero de sistemas es la red en su conjunto; y las máquinas sincrónicas no son más que un elemento presente en la red.
Entre los tipos particulares de cargas conviene considerar más de cerca aquella constituida por un motor asincrónico, puesto que, debido a las evidentes analogías que presenta con las máquinas sincrónicas, podemos más fácilmente aclarar la naturaleza y la necesidad de las muchas reactancias introducidas para las máquinas sincrónicas.
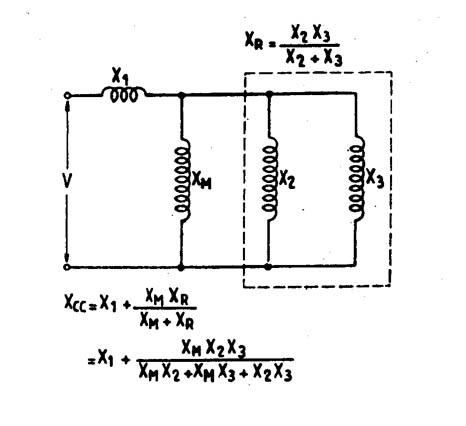
Como es sabido, el comportamiento del motor asincrónico en todas sus posibles condiciones de funcionamiento, en régimen, es decir después de extinguido cualquier transitorio, se puede analizar completamente recurriendo al conocido circuito equivalente de la figura 1017.
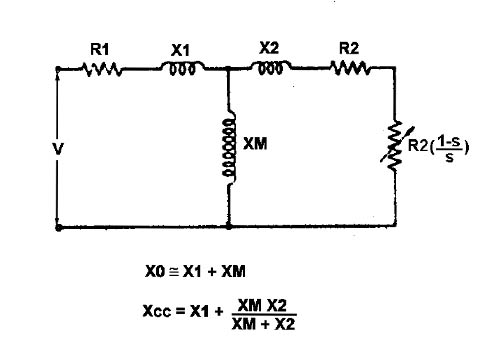
De este circuito, para cualquier valor del resbalamiento s, se obtiene el valor de la correspondiente impedancia mediante la cual se puede determinar la corriente absorbida y su correspondiente fase, que son los dos elementos que mayormente interesan al ingeniero de sistemas.
Entre las distintas condiciones de funcionamiento dos son particularmente interesantes. La primera es aquella que corresponde al caso límite s = 0, es decir al funcionamiento en vacío del motor; y esta condición está defina por la impedancia de vacío, cuyo valor se obtiene inmediatamente del circuito equivalente considerando abierto el secundario, dado que la correspondiente resistencia  resulta infinita.
resulta infinita.
Esta impedancia en vacío está constituida por la resistencia y la reactancia correspondiente al primario, que se compone del flujo de dispersión (reactancia de dispersión del primario) y del flujo en el circuito magnético principal (reactancia magnetizante) es decir:
X0 = X1 + XM
La otra condición de funcionamiento interesante es aquella correspondiente al caso límite de s = 1, es decir al funcionamiento en cortocircuito, o sea con rotor detenido; esta condición está a su vez definida por la impedancia de cortocircuito cuyo valor, como resulta del circuito equivalente, está dada aproximadamente por la suma de las resistencias y de las reactancias de los arrollamientos primario y secundario. Despreciando las resistencias la reactancia de cortocircuito resulta:

Mientras se considera el fenómeno en régimen la impedancia equivalente es función unívoca del resbalamiento s de acuerdo con el circuito equivalente. Pero cuando se consideran los fenómenos transitorios la impedancia que entra en juego, para cualquier valor del resbalamiento, es siempre la impedancia de cortocircuito.
Es conocido por todos que cuando se conecta un generador asincrónico a una red, después que el rotor es llevado por el motor de impulso a la velocidad de sincronismo, se tiene un pico de corriente cuyo valor está dado por la relación:

siendo V la tensión de la red y Zcc la impedancia de cortocircuito. Este pico de corriente decrece rápidamente y dentro un tiempo muy breve (si la conmutación es con interrupción), del orden de décimas de segundo, la corriente absorbida por el generador asincrónico se reduce a la corriente de vacío que está dada por:

siendo Z0 la impedancia de vacío. Lo mismo sucede durante el arranque estrella-triángulo de los motores asincrónicos: después del arranque en estrella se admite que en el tiempo de pasaje de la conexión estrella a la conexión triángulo, el reducido flujo del motor, se extingue completamente, en el instante en el cual el motor es reconectado a la red con su conexión en triángulo la corriente absorbida alcanza el valor:

para después descender al valor de régimen correspondiente al efectivo resbalamiento. Se puede llegar a la conclusión que en los motores asincrónicos todos los fenómenos transitorios están siempre determinados por la impedancia de cortocircuito, la cual puede con derecho denominarse impedancia transitoria.
Reactancia sincrónica directa y en cuadratura
Terminada esta larga pero necesaria introducción, pasamos ahora a definir las distintas reactancias y para ello consideramos en primer lugar una máquina sincrónica, conectada a una red, sin carga activa, y disminuyéndole gradualmente la excitación hasta anularla, permaneciendo la máquina siempre en sincronismo.
La corriente absorbida de la red alcanza un cierto valor que llamaremos I0. La relación entre la tensión en bornes y la corriente I0 se denomina comúnmente impedancia sincrónica o también reactancia sincrónica, siendo como antes dicho, los dos valores prácticamente coincidentes.
Ahora basta reflexionar un momento para darse cuenta que esta reactancia sincrónica no es nada distinta de la reactancia en vacío de los motores asincrónicos. En ambos casos las máquinas toman de la red una cierta corriente que produce un flujo rotante sincrónico con el rotor, el cual en ambos casos no está recorrido por ninguna corriente.
La relación entre el flujo rotante y la corriente que lo produce es naturalmente la inductancia correspondiente a la reactancia en vacío en los motores asincrónicos y la reactancia sincrónica en las máquinas sincrónicas.
La corriente I0 que esta última absorbe puede también denominarse corriente de vacío; y el hecho de que esta pueda alcanzar un valor próximo y a veces superior a la nominal, mientras que en los motores asincrónicos se encuentra alrededor del 25% y el 40% de la corriente nominal, no debe llevar a engaño: esto depende únicamente del valor notablemente superior que en las máquinas sincrónicas, por varias y conocidas razones, tiene el entrehierro.
También se puede definir la reactancia sincrónica utilizando las características de vacío y de cortocircuito adoptando el mismo eje de abscisa; y la reactancia sincrónica se obtiene como relación entre los correspondientes valores de la tensión en bornes y de la corriente de cortocircuito, asumiendo el característico comportamiento que se indica en la figura 1018.
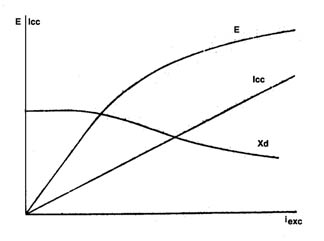
Definir la reactancia sincrónica como relación entre dos valores correspondientes a dos funcionamiento tan distintos, se podría decir casi opuestos, como son los de vacío y de cortocircuito, muestran esta reactancia como algo híbrido (es una especie de reactancia de Thevenin) y conducen a que muchos se pregunten para que sirve y cual es el significado de una reactancia definida de un modo así artificial.
La definición antes dada, como relación entre los dos valores contemporáneos de la tensión aplicada y de la corriente absorbida, cuando la excitación y la carga son nulas, es decir la perfecta correspondencia a la reactancia de vacío de los motores asincrónicos, la hace indudablemente más persuasiva y más claro y concreto su significado físico.
La condición de funcionamiento con carga activa nula y excitación nula, mediante la cual se ha definido la reactancia sincrónica, no es una condición de funcionamiento hipotética, por lo contrario es aquella que se acerca y tal vez se alcanza durante la energización de las líneas.
No se debe creer que la reactancia sincrónica determine solamente esta condición de funcionamiento: cualquier otro funcionamiento en régimen permanente está igualmente determinado por esta reactancia. Si la excitación en vez de ser nula tiene un valor tal que en vacío le corresponde una f.e.m. inducida E, la corriente de inducido se obtiene dividiendo por la reactancia sincrónica la tensión resultante de la composición vectorial de la f.e.m. E y de la tensión en bornes V como indica la figura 1019.
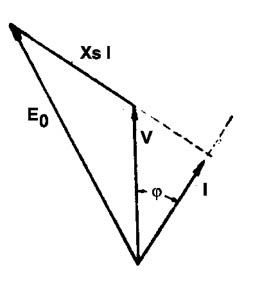
Consiguientemente en las expresiones de la potencia máxima, de la potencia en función del ángulo de carga, de la potencia sincronizante y de todas las otras magnitudes correspondientes al régimen permanente, aparece siempre la reactancia sincrónica.
Lamentablemente las cosas no siempre son tan simples, en cambio se puede decir que lo dicho se verifica sólo para las máquinas con inductor cilíndrico, y también en este caso sólo con una cierta aproximación.
Para aclarar este punto retornamos un momento al funcionamiento en vacío y con excitación nula de la cual se ha partido para aclarar el concepto de reactancia sincrónica.
El flujo producido por la corriente del estator gira en perfecto sincronismo con el rotor, pero no se ha hecho ninguna hipótesis acerca de la posición relativa entre el eje del flujo y el eje del rotor. Esto es admitido para las máquinas con inductor cilíndrico, como son los turbo alternadores cuyo rotor puede considerarse con buena aproximación magnéticamente isótropo y por lo tanto cada eje es equiparable a cualquier otro. Pero la situación cambia notablemente en el caso de las máquinas de polos salientes. Aquí no se puede hablar de isotropía magnética, ni siquiera en modo aproximado.
Manteniéndose invariable la tensión en bornes, permanece constante el flujo rotante, dado que su valor debe ser tal de producir una f.e.m. igual y opuesta a la tensión impuesta. Pero la corriente que la máquina absorbe de la red para producir tal flujo varía mucho según el recorrido del flujo a través del rotor como muestra la figura 1020.
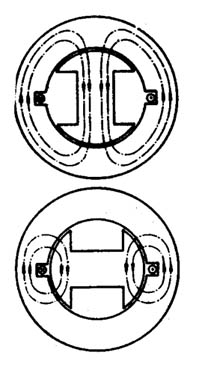
Esa corriente alcanza el valor mínimo si el flujo recorre el rotor según el eje directo, siendo este el recorrido de mínima reluctancia; y alcanza el valor máximo si en cambio el rotor está recorrido según el eje en cuadratura como dicho anteriormente, en este caso el rotor presenta al flujo la máxima reluctancia. Consecuentemente en las máquinas sincrónicas de polos salientes se deben considerar necesariamente dos distintas reactancias sincrónicas: la primera, corresponde al mínimo valor de corriente absorbida, se denomina comúnmente reactancia sincrónica directa y se la indica con Xd, puesto que el flujo recorre el rotor según el eje directo; la segunda, corresponde al valor máximo de la corriente absorbida, y se la denomina reactancia sincrónica en cuadratura y se indica con Xq por analogía con la anterior.
Reactancia transitoria directa y en cuadratura
Las dos reactancias, sincrónicas directa y en cuadratura, determinan completamente cualquier funcionamiento en régimen permanente de las máquinas de polos salientes y aparecen en todas las expresiones relativas a tal régimen; pero no dicen nada del comportamiento en régimen transitorio, es decir de cómo esas máquinas reaccionan frente a imprevistas variaciones de carga, de la tensión o de la corriente de excitación.
Para examinar este comportamiento conviene proceder por pasos y considerar en primer lugar que sucede con el caso particular del motor asincrónico sincronizado, que es siempre una verdadera y propia máquina sincrónica aún siendo construida como un motor asincrónico.
Supongamos el rotor bifásico y una de las dos fases utilizada como arrollamiento de excitación, la otra cerrada en cortocircuito con la función de arrollamiento amortiguador.
Podemos considerar esta máquina como sometida a una alimentación estatórica proveniente de la red a la cual está conectada y a una alimentación rotórica por medio de una fuente de corriente continua que alimenta el arrollamiento de excitación.
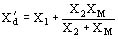
Por la ley de superposición de los efectos podemos, prescindiendo de la saturación, estudiar el comportamiento de la máquina separadamente respecto a cada una de estas dos alimentaciones, ignorando completamente la otra. Ignoramos por lo tanto la alimentación rotórica y supongamos despreciable la impedancia interna de la fuente de corriente continua. Respecto, a la alimentación estatórica la máquina no se diferencia en nada de un común motor asincrónico y por lo tanto esta reactancia de cortocircuito define completamente su comportamiento en régimen transitorio. Esta reactancia, como visto, está dada por la expresión:

en la cual X1, X2, XM son respectivamente las reactancias correspondientes al flujo de dispersión del estator, al flujo de dispersión del rotor y al flujo principal. Puesto que el rotor es magnéticamente y eléctricamente isótropo tal reactancia asume siempre el mismo valor cualquiera sea el eje del rotor a la cual se refiere; es decir el transitorio resulta siempre el mismo cualquiera sea la posición del rotor en el instante en que se lo verifica.
Siempre considerando como máquina sincrónica el mismo motor asincrónico sincronizado, supongamos ahora que la segunda fase del rotor en vez de cerrada en cortocircuito esté abierta. El rotor es todavía magnéticamente isótropo, pero eléctricamente no lo es más; en efecto este rotor tiene un arrollamiento monofásico, como todas las máquinas sincrónicas convencionales, y no más un arrollamiento polifásico.
La reactancia transitoria coincide por lo tanto con la reactancia de cortocircuito sólo si se la refiere al eje rotórico coincidente con el eje de la fase utilizada como arrollamiento de excitación, que por otro lado no es otra cosa que el eje directo; mientras que referida al eje de la segunda fase dejada abierta, en cuadratura con la anterior, coincide obviamente con la reactancia en vacío del motor asincrónico.
La misma cosa sucede naturalmente en las máquinas sincrónicas que tienen sólo un arrollamiento de excitación según el eje directo y el circuito magnético del rotor enteramente laminado: la reactancia transitoria según el eje directo coincide con la reactancia de cortocircuito y por la tanto está dada por la misma expresión:
Mientras que según el eje en cuadratura la reactancia transitoria coincide siempre con la reactancia sincrónica, es decir:
X´q = Xd
Reactancia subtransitoria directa y en cuadratura
No siempre el circuito magnético está completamente laminado, por ejemplo el cuerpo cilíndrico de los turboalternadores es a veces una pieza forjada, y en casos similares se pueden desarrollar notables corrientes parásitas.
Además también en el caso donde el rotor está completamente laminado, el mismo está provisto de arrollamiento amortiguador por lo cual prácticamente en el rotor jamás se tiene solamente el arrollamiento de excitación.
En consecuencia la reactancia de cortocircuito no está dada por una expresión tan simple como la recientemente indicada y que deriva del circuito equivalente del motor asincrónico; es necesario recurrir a circuitos equivalentes más complejos.
Si se prescinde de los circuitos sede de corrientes parásitas y consideramos sólo los arrollamientos de excitación y de amortiguación, el circuito equivalente se puede reducir al de un motor asincrónico de doble jaula, puesto que en ambos casos se tiene en el rotor dos circuitos en paralelo como muestra la figura 1021 y a parte las mayores dificultades debido a la no uniforme distribución de las barras amortiguadoras a lo largo de la periferia del rotor, y la anisotropía del circuito magnético del mismo rotor, la reactancia de cortocircuito puede calcularse aproximadamente del mismo modo por la expresión:
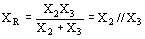
donde X2 y X3 son respectivamente las reactancias correspondientes a los flujos de dispersión del arrollamiento de excitación y del arrollamiento amortiguador. De esta expresión se observa que la dispersión equivalente del rotor es menor de cada una de las dos dispersiones en paralelo. Por lo tanto la presencia del arrollamiento amortiguador disminuye sensiblemente la reactancia de cortocircuito y, en proporción inversa a tal disminución, aumenta la corriente instantánea de cortocircuito.
Se debe observar que en las máquinas sincrónicas con arrollamiento amortiguador, o con el circuito magnético del rotor no enteramente laminado, la reactancia de cortocircuito no coincide con la reactancia transitoria. Esta afirmación puede en primer momento sorprender, pero la misma se justifica si se examina el comportamiento típico de la corriente transitoria de cortocircuito, registrada por ejemplo mediante un oscilograma figura 1022 y 1023.
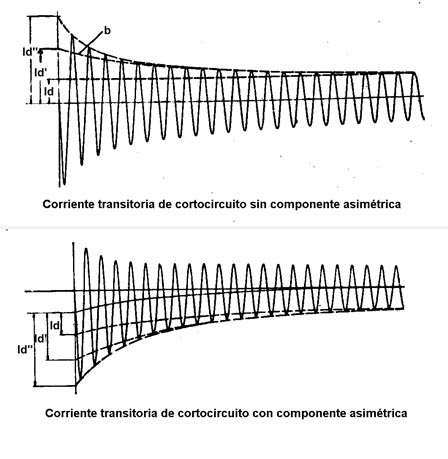
Esta corriente se inicia con un pico máximo cuyo valor Id'' está determinado por la reactancia de cortocircuito; ella decrece primero bruscamente para después asumir un comportamiento todavía decreciente, pero con menor rapidez.
La curva logarítmica, envolvente de este segundo comportamiento (curva b en la figura 1022), prologada hasta alcanzar el eje de ordenadas pasante por el tiempo cero, intercepta sobre este mismo eje una corriente Id' cuyo valor está en cambio determinado por la reactancia correspondiente a la dispersión de solamente los arrollamientos de inducido e inductor, es decir de aquella reactancia que en el caso de ausencia de otros arrollamientos sobre el rotor, coincide con la reactancia de cortocircuito.
Esto depende del hecho que durante el transitorio las corrientes inducidas en el arrollamiento amortiguador o en las partes macizas del rotor, debido a la pequeña constante de tiempo de los correspondientes circuitos, se extinguen muy rápidamente, mientras la corriente inducida en el arrollamiento inductor se extingue mucho más lentamente siendo su correspondiente constante de tiempo mucho más grande.
Se ha convenido en denominar: componente subtransitoria la corriente rápidamente decreciente en los primeros instantes y reactancia subtransitoria la reactancia de cortocircuito que contribuye a determinar el valor y el decremento; componente transitoria la corriente que decrece más lentamente y reactancia transitoria la reactancia que también en este caso contribuye a determinar el valor y el decremento.
Esta distinción entre corriente subtransitoria y corriente transitoria puede parecer artificial o no satisfactoria. En el fondo también la corriente subtransitoria es también una corriente transitoria y el "sub" parece solamente una complicación de las cosas. Es oportuno preguntarse si no basta considerar solamente la corriente subtransitoria y su relativa reactancia y denominarlas simplemente corriente y reactancia transitoria, sin preocuparse del comportamiento que adopta la corriente durante todo el transitorio, con la ventaja que la reactancia coincidiría con la reactancia de cortocircuito como ocurre en el caso más simple.
En efecto esta distinción no se debe sólo al escrúpulo de una más exacta representación del fenómeno, pero también está impuesta por una mayor exigencia. De la reactancia subtransitoria se llega a la máxima corriente de cortocircuito, para cuya solicitación es necesario dimensionar la resistencia mecánica de la máquina y de las conexiones, los interruptores y el resto del equipamiento afectado.
Pero en los fenómenos transitorios, particularmente en aquellos relativos a la estabilidad, la corriente subtransitoria no tiene ninguna importancia porque ella desaparece antes de haber podido producir cualquier efecto apreciable.
En el período inmediatamente sucesivo, durante el cual la máquina se encuentra en régimen de estabilidad dinámica, la corriente que circula en ella es la corriente transitoria; y la reactancia que interviene en las expresiones de las distintas magnitudes que se consideran durante el mismo período es también la reactancia transitoria.
Como se ha visto para las reactancias sincrónica y transitoria, también la reactancia subtransitoria presenta distinto valor si se la refiere al eje directo o a eje en cuadratura, y en consecuencia se tiene una reactancia subtransitoria directa Xd'' y una reactancia subtransitoria en cuadratura Xq''.
Reactancia de secuencia negativa
Se ha visto que las reactancias sincrónicas permiten determinar el comportamiento de las máquinas sincrónicas en régimen estático, es decir cuando el flujo rotante está en sincronismo con el rotor y, según la coincidencia o perpendicularidad del eje del rotor con el eje del flujo, se tiene la reactancia sincrónica directa o aquella en cuadratura.
En otros términos estas dos reactancias definen el comportamiento de las máquinas sincrónicas respecto de un sistema de tensiones o de corrientes de secuencia positiva o directa, después que se ha extinguido cada transitorio.
En caso de desequilibrio de carga o de asimetría del sistema de tensiones de la red a la cual la máquina está conectada, la máquina se encuentra sujeta también a un sistema de corrientes y de tensiones de secuencia negativa o inversa, que producen un flujo que gira respecto al rotor con un deslizamiento igual a 2, es decir un flujo que no es más sincrónico con el rotor.
Igualmente un flujo que no es más sincrónico con el rotor produce las armónicas presentes en las redes que se tienen, por ejemplo, cuando una parte no despreciable de la carga está constituida por rectificadores de corriente, especialmente si son del tipo con control de grilla.
Se debe por lo tanto investigar cual o cuales reactancias permiten determinar el comportamiento de las máquinas sincrónicas en estos casos. Un flujo asincrónico respecto al rotor induce corrientes en todos los posibles circuitos del rotor; es decir en el arrollamiento de excitación, en los eventuales arrollamientos amortiguadores y en todos los circuitos donde se tienen corrientes parásitas en las partes macizas del rotor.
Resulta entonces evidente que la reactancia relativa debe ser necesariamente la reactancia subtransitoria, como se observa más claramente recurriendo a la analogía con el motor asincrónico de doble jaula. Siendo también el flujo asincrónico respecto al rotor, su eje encuentra el rotor alternativamente según el eje directo y según el eje en cuadratura.
Se entiende por lo tanto que la reactancia que estamos buscando y que se define reactancia de secuencia negativa es tal vez también una reactancia asincrónica, deberá ser un valor medio entre la reactancia subtransitoria directa y la reactancia subtransitoria en cuadratura.
Dados dos valores de una magnitud cualquiera se pueden definir por lo menos tres valores medios, siendo los tres válidos y con la misma prioridad. Se deberá establecer cual entre estos valores medios representa la reactancia de secuencia negativa.
En primer lugar tenemos la media aritmética para la cual corresponde la expresión:
tenemos después la media armónica:

y finalmente la media geométrica:

El hecho sorprendente es que estas tres expresiones son igualmente aceptables, es decir las tres representan la reactancia de secuencia negativa. Más precisamente respecto a un sistema de corrientes de secuencia negativa vale la reactancia dada por la media aritmética; respecto a un sistema de tensiones negativas vale la reactancia dada por la media armónica; finalmente en el caso de cortocircuito entre dos fases la reactancia está dada por la media geométrica.
Si ninguna primacía se puede hacer entre las tres expresiones desde el punto de vista matemático, en la práctica una cierta preferencia y por lo tanto una cierta simplificación puede en cambio resultar válida. Se ha dicho que la media armónica da la reactancia respecto a un sistema de tensiones de secuencia negativa; pero en general un sistema de estas características se genera en un punto de la red a una cierta distancia de los bornes de la mayor parte de las máquinas sincrónicas conectadas a esta red.
Por lo tanto, respecto al sistema de tensiones de secuencia negativa, a la reactancia de la máquina sincrónica se agrega la reactancia de la línea y de los transformadores interpuestos, de manera que la reactancia total resulta:
que, para X suficientemente grande respecto de Xd'' y Xq'', tiende al valor:
es decir la reactancia de la máquina sincrónica tiende también en este caso a identificarse con la media aritmética entre las dos reactancias subtransitorias, la cual se adopta comúnmente como reactancia de secuencia negativa sin mayores distinciones.
Reactancia de secuencia cero
La corriente que circula normalmente en cada una de las tres fases de una máquina trifásica, está desplazada de 120º eléctricos respecto de las otras dos; dejando de lado el juego de palabras, las corrientes en las tres fases tienen distinta fase, de allí la denominación de corriente trifásica.
Este hecho, conjuntamente con el otro, da lugar a una f.m.m. resultante que produce el flujo rotante de amplitud constante cuyo valor es 3/2 el valor máximo de la f.m.m. de cada fase.
Si todavía el neutro de la máquina está conectado a tierra o si se lo utiliza para la distribución a 4 conductores, en la máquina puede circular también un sistema de corrientes de secuencia cero, es decir tres corrientes idénticas en valor y fase y por lo tanto teniendo en cada instante el mismo valor instantáneo.
Estando los arrollamientos de las tres fases desfasados en 120º eléctricos, estas tres corrientes dan lugar en cada instante a una f.m.m. resultante idénticamente nula.
F.m.m. nula significa flujo nulo y por lo tanto reactancia nula. Se debería concluir que la reactancia de una máquina trifásica, respecto de un sistema de corrientes o de tensiones de secuencia cero, es también ella nula.
En efecto esta reactancia es pequeña, a veces muy pequeña, pero no es, y no puede ser jamás, nula. Efectivamente las tres corrientes de secuencia cero dan lugar por otro lado a una f.m.m. resultante nula y a un flujo resultante nulo, pero cada f.m.m. produce también un flujo que no se concatena con las otras dos fases, se debe notar que este particular flujo disperso da lugar a la reactancia de secuencia cero.
Un primer análisis conduciría a pensar que esta reactancia debería coincidir con la reactancia de dispersión de inducido; pero no es así. Esta última reactancia comúnmente alcanza y supera el 10% de la reactancia nominal la cual, dicho incidentemente, está dada por la relación entre la tensión nominal y la corriente nominal; mientas la reactancia de secuencia cero puede ser sólo el 2 o 3% de la reactancia nominal.
Efectivamente, una buena parte del flujo de dispersión en las ranuras y en las cabezas de bobinas, que forman parte del flujo de dispersión del inducido, está dado por la acción común de las tres fases y este flujo se anula para las tres corrientes de secuencia cero, por las razones ya dichas.
Por lo tanto la reactancia de secuencia cero es una reactancia que tiene su propio y bien definido valor, que varía considerablemente con el tipo de arrollamiento, y lo único que podemos afirmar con certeza es que ella resulta siempre más o menos inferior a la reactancia correspondiente a la dispersión del inducido.
La reactancia de secuencia cero se la indica con el símbolo X0.
Reactancia de Potier
Con la reactancia de secuencia cero se termina de resumir todas las reactancias funcionales de las máquinas sincrónicas, es decir todas las reactancias que interesan sobre todo al ingeniero que se dedica a sistemas.
Se desea ahora agregar dos palabras sobre una reactancia que, si no concierne al ingeniero de sistemas, tiene un cierto interés para el constructor: se refiere a la reactancia de Potier.
La reactancia de Potier es una reactancia muy singular. Todas las otras reactancias que hemos examinado están todas asociadas a un cierto flujo, físicamente individualizable en la máquina. Mientras que el flujo correspondiente a la reactancia de Potier, aún estando bien definida en valor, no es físicamente individualizable.
Como es conocido esta reactancia se obtiene mediante una construcción gráfica que utiliza la característica de vacío; y por lo tanto admite implícitamente que la distribución del flujo en las distintas partes de la máquina es la misma tanto en vacío como en carga.
Esto no es cierto por dos razones: en primer lugar porque existe una cierta dispersión del inductor; en segundo lugar porque se tiene, en general, un cierto grado de saturación del mismo inductor. Si no hubiera saturación del inductor la reactancia de Potier coincidiría con la reactancia de dispersión del inducido. Si en cambio la saturación se tiene sólo en el inductor y no en el inducido la reactancia de Potier coincidiría con la reactancia transitoria directa: este resultado, es tal vez sorprendente, pero perfectamente demostrable.
Si finalmente la saturación fuese nula, tanto del inductor como del inducido, la reactancia de Potier asumiría un valor indeterminado.
Puesto que esta última hipótesis se debe excluir, aunque más no sea por razones económicas, se pude concluir que en la práctica el valor de la reactancia de Potier resulta siempre comprendido entre el valor de la reactancia transitoria directa y el de la reactancia de dispersión del inducido.
INTRODUCCION A LA MAQUINA BASICA
Hemos avanzado en encontrar significado a las reactancias funcionales de las máquinas rotantes, el siguiente paso es desarrollar un modelo de cada máquina (aunque lo ideal sería lograr un modelo único aplicable en todos los casos).
Para realizar un análisis técnico de cualquier dispositivo, el procedimiento básico es formular las ecuaciones que lo describen aplicando las leyes de la física. El segundo paso consiste en resolver estas ecuaciones de manera de obtener una información útil.
Cuando se presenta un equipo nuevo puede ser tratado de este modo, pero si el nuevo equipo tiene descripciones matemáticas similares a otro, entonces gran parte del trabajo puede repetirse innecesariamente para cada equipo analizado. Por lo tanto, si las ecuaciones de varios equipos son similares (o idénticas), estos serán análogos, y las ecuaciones necesarias se deben resolver solamente una vez para proporcionar un análisis válido para todos los equipos.
Analogía y concepto del modelo
La solución de los problemas por analogía es muy común: un sistema mecánico de una masa amortiguada por un resorte es análogo a un circuito eléctrico que tiene inductancia, capacidad y resistencia; el ingeniero mecánico puede resolver un circuito eléctrico convirtiéndolo en un sistema mecánico análogo, y el ingeniero electricista puede resolver un problema mecánico convirtiéndolo en un circuito eléctrico análogo.
Cuando un sistema físico es análogo a otro sistema físico y se elige uno para representar el otro en el desarrollo de la investigación, tal sistema se denomina "modelo".
En idéntica manera, cuando programamos una computadora analógica o digital para analizar un determinado sistema, las ecuaciones utilizadas se denominan frecuentemente "modelo matemático" del sistema.
Cuando se decide usar un modelo para el análisis de un equipo, o clase de equipos, la elección del modelo está lejos de ser arbitraria. El modelo, naturalmente, debería ser familiar con el análisis, puesto que uno de los principales propósitos del modelo de aproximación es reducir el trabajo; un problema conocido permite un más rápido manejo.
El modelo deberá ser capaz de representar el verdadero equipo con tanta precisión como se requiere para los propósitos del análisis. Bajo las condiciones especificadas esto significa que las ecuaciones del modelo deberían ser las mismas que las ecuaciones del equipo real.
Idealmente las ecuaciones del modelo son precisamente las mismas que las ecuaciones del equipo real, pero puede permitirse alguna desviación cuando se considera oportuno. En el caso en que el fenómeno estudiado presente efectos de saturación (por ejemplo), esto no significa que un modelo que no tenga saturación no pueda usarse; solamente restringe el uso del modelo para el análisis de funcionamiento sin saturación (condiciones de linealidad) y un análisis aproximado en fase de saturación.
Las ecuaciones del equipo real deben ser conocidas (ellas deben formularse de las leyes físicas básicas) para elegir un modelo conveniente, y el análisis realizado deberá ser suficientemente similar con otros equipos o sistemas, mediante otras situaciones que nos llevarán a las mismas ecuaciones. En otras palabras, la experiencia es un factor en la elección de un modelo, y la justificación del modelo es meramente una manera de mostrar que las ecuaciones del modelo y el equipo se corresponden.
Los modelos para las máquinas rotantes se utilizan frecuentemente cuando las ecuaciones que los representan derivan de las leyes físicas, por las siguientes razones: para simplificar las manipulaciones matemáticas; para reducir el tiempo y labor requeridos para el estudio de muchas máquinas; y más importante, para mostrar que muchas máquinas rotantes diferentes son básicamente similares en su naturaleza física y que los principios de conservación de energía son realmente los mismos para todas.
El circuito modelo, algunas relaciones con las máquinas reales
Para modelar máquinas rotantes se elige un circuito modelo, que consiste únicamente en un número de circuitos eléctricos, cada uno comprende resistencia y autoinductancia, y estos circuitos están acoplados inductivamente. Cuando se energizan estos circuitos, cada circuito produce un campo magnético y si el campo magnético neto tiene las mismas características del campo magnético de la máquina real, las ecuaciones del circuito pueden usarse para calcular las características de la máquina.
Puesto que la estructura idealizada tiene simetría radial y es magnéticamente lineal (se desprecia la saturación y la histéresis), es aplicable el principio de superposición, y el campo puede ser descompuesto en componentes a lo largo de dos radios cualesquiera.
Cuando definimos un modelo es conveniente utilizar terminología, definiciones, convenciones, y signos algebraicos estandarizados. Es también conveniente relacionar el modelo con la máquina real, por lo menos para que ciertos signos algebraicos sean rápidamente interpretados en las ecuaciones del modelo.
Para representar las características eléctricas sólo se requiere plantear ecuaciones circuitales, la descripción del equilibrio mecánico dinámico requiere plantear ecuaciones auxiliares (derivadas de la mecánica), y que pueden ser representadas también con circuitos eléctricos.
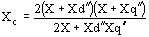
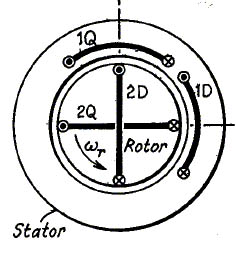
Veamos el modelo de la máquina sincrónica, figura 1024 observemos como se ha usado la descomposición del campo. De este modo las bobinas del modelo están ubicadas sobre dos radios, los cuales se eligen, por conveniencia del análisis, de modo que formen un ángulo recto entre si. Las bobinas del modelo se eligen estacionarias, el hecho de que las bobinas en la máquina real pueden girar es tratado matemáticamente, cuando es necesario, aplicando una transformación de coordenadas.
Otro ejemplo análogo corresponde a la máquina asincrónica, figura 1025 también para este caso se ha usado la misma propuesta.
Los estudios conducidos por Kronk y Park (quedándonos sólo con los primeros clásicos) condujeron a proponer un modelo de máquina universal que representa cualquier máquina eléctrica (limitándonos a máquinas normales).
Lo que habíamos expresado como objetivo ideal, lograr un modelo único de las máquinas (aplicable en todos los casos), fue logrado por estos estudiosos, y sucesivamente desarrollado.
Del modelo de la máquina universal se desprenden los distintos modelos, y particularmente nos interesa el de la máquina sincrónica, figura 1024, que con los circuitos amortiguadores es representada para un régimen cualquiera con un sistema de 5 ecuaciones, debiéndose determinar 5 corrientes.
Para lograr dar forma a estas 5 ecuaciones se plantea un circuito equivalente que incluye los arrollamientos, y que tiene resistencias propias, inductancias propias y mutuas.
Para poner a prueba con este modelo un proyecto es necesario estimar sus parámetros y en particular:
- Resistencia estator
- Resistencia rotor
- Resistencia amortiguador directo
- Resistencia amortiguador Q (en cuadratura)
- Inductancia (propia) de armadura directa
- Inductancia de armadura Q
- Inductancia de campo
- Inductancia amortiguador D
- Inductancia amortiguador Q
- Mutua campo armadura
- Mutua amortiguador D - armadura d
- Mutua amortiguador Q - armadura q
- Mutua amortiguador D - campo
De estas se pueden obtener las:
- Inductancia subtransitoria D
- Inductancia subtransitoria Q
- Inductancia transitoria D
Como también las constantes de tiempo:
- T subtransitoria D
- T subtransitoria Q
- T transitoria D
Mientras que las resistencias son fáciles de intuir, las inductancias (o reactancias) propias de los circuitos y mutuas, presentan dificultad.
Por otra parte los datos de interés que en general se piden acompañando una oferta de máquinas sincrónicas son las reactancias transitorias, subtransitorias y sincrónicas. Y el problema es obtener a partir de estos valores, las inductancias propias y mutuas del modelo.
Veamos como en la ejecución del programa SINCRO se obtienen los valores de interés:
En el Capítulo 3 se explica como avanza el programa para la máquina de polos salientes (en el Capítulo 4 para rotor liso), hasta el paso 9 en el cual se completa el cálculo del devanado del polo de excitación, se dan indicaciones sobre los arrollamientos amortiguadores y se completa el panorama de pérdidas.
Con este paso se considera terminado el cálculo, con la geometría, y el proyecto electromagnético de la máquina, totalmente definidos, la explicación termina.
Hemos comentado cuales son los parámetros de interés de quienes estudian el funcionamiento de la máquina, y para satisfacer esta necesidad se agregaron los pasos 10 y 11, y a continuación se explica que se hace en estos pasos, particularmente el cálculo de parámetros funcionales.
Determinación de reactancias transitorias
En el quinto paso se han determinado todos los parámetros necesarios para calcular las componentes de la reactancia de dispersión del estator, es decir, la dispersión de ranura, de entrehierro y de las cabezas del devanado.
Con estos términos se calcula la reactancia de dispersión por fase y finalmente el valor correspondiente a una estrella equivalente (normalmente los alternadores se conectan en estrella siendo estos valores coincidentes).
En el décimo paso, con esta última reactancia de dispersión se determina la caída que se presenta para la corriente nominal, que también se expresa en p.u.
siendo CORR(1) la corriente nominal y X(1) la reactancia de dispersión.
En el octavo paso se ha determinado la característica de vacío, que relaciona la tensión de fase en valor relativo con la característica de entrehierro y la característica de excitación (corona estatórica, diente, polo y corona rotórica).
A partir de la caída de tensión (en valor relativo) se determina la f.m.m. FMMVS valor saturado interpolando con la tensión en valor relativo y la característica de excitación, y la f.m.m. FMMVN valor no saturado obtenido de la característica de entrehierro solamente.
Se hace la relación entre estos dos valores FMMVS/FMMVN.
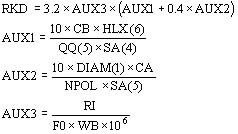
En el octavo paso se determina la f.m.m. de reacción de inducido referida al inductor; para máquinas de polos salientes en el Capítulo 3 de la figura 3.38 se obtiene el coeficiente de reacción de armadura CRI en función de la relación BTAUP, y la f.m.m. resulta:
RI = CRI x CAC(1) x CORR(1) x QPF(1) x HK(3,1)
Para máquinas de dos polos la f.m.m. resulta:

La relación de cortocircuito RCC es la relación entre la f.m.m. necesaria para tener en vacío la tensión nominal y la f.m.m. necesaria para tener en cortocircuito la corriente nominal. Se trata de un factor importante para la máquina sincrónica. Una RCC pequeña indica una reacción de armadura mayor, es decir, una máquina sensible con respecto a las variaciones de carga y viceversa.
La característica de cortocircuito resulta una recta porque con la máquina en cortocircuito (valor nominal de la corriente) la f.e.m. inducida y el flujo son pequeños, en consecuencia no se presenta saturación.
Para ello a la f.m.m. correspondiente a la caída en la reactancia de dispersión se le suma la f.m.m. de reacción de inducido valores antes calculados:
FMMS = FMMVS + RI
FMMN = FMMVN + RI
Finalmente se puede determinar la relación de cortocircuito para valor no saturado RCCN y saturado RCCS.
Con estos valores se obtiene en p.u. la reactancia sincrónica no saturada directa XSDN y la saturada directa XSDS que son iguales a la inversa de las correspondiente relaciones de cortocircuito.
Una parte de estas reactancias sincrónicas es debida a la reacción del inducido y su valor en ohm resulta:
XRIN = XSDN x ZBASE - X(1)
XRIS = XSDS x ZBASE - X(1)
siendo ZBASE = UF(1) / CORR(1)
Se determina con la resistencia y la reactancia de dispersión por fase del devanado estatórico la constante de tiempo del mismo en segundos:
Por ultimo con el valor DU (relación entre el flujo disperso / flujo útil) determinado en el paso sexto, se determina la reactancia transitoria directa saturada y no saturada en ohm:
Determinación de los parámetros funcionales de las máquinas sincrónicas
Los valores determinados en el paso décimo son aproximados, en la búsqueda de mejores valores hemos tenido acceso a una bibliografía presentada en el Apéndice 19 que determina las reactancias y las constantes de tiempo, utilizando la metodología propuesta por René Daguet [1] para máquinas de polos salientes. En el paso undécimo se desarrollan estos cálculos, que dan una mejor aproximación.
La reactancia base es Zapp = U/Ö 3I, siendo U la tensión en bornes de la máquina; U/Ö 3 expresa la tensión de fase, y Zapp está expresada en ohm por fase.
Reactancias
El objetivo es determinar las reactancias según el eje directo (longitudinal) formada por, figura 1044 (sin considerar las resistencias), XS reactancia de fuga de inducido, en serie con el paralelo de las reactancias:
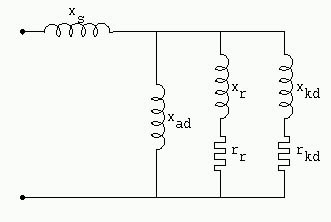
XAD: reactancia de entrehierro
XR: reactancia de fuga de los inductores
XKD: reactancia del circuito amortiguador
y según el eje en cuadratura (transversal) formada por, figura 1045 (sin considerar las resistencias), XS reactancia de fuga de inducido, en serie con el paralelo de las reactancias:
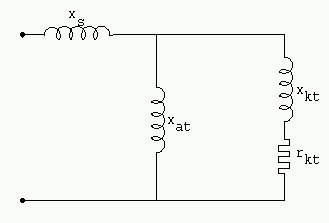
XAT: reactancia de entrehierro
XKT: reactancia del circuito amortiguador
La reactancia sincrónica, en régimen permanente según el eje directo (reactancia de fuga de inducido y reactancia de entrehierro):
XD = XS + XAD
y por analogía según el eje transversal reactancia sincrónica transversal (reactancia de fuga de inducido y reactancia de entrehierro):
XT = XS + XAT
Los flujos en cortocircuito y otras condiciones
Cuando una máquina gira en vacío el flujo acompaña al inductor, e induce las fuerzas electromotrices.
Cuando se presenta un cortocircuito aparecen varios fenómenos que están superpuestos, y que debemos separar para comprenderlos mejor.
El cortocircuito es causa de una elevada corriente en el circuito inducido, con componentes alternas y continuas, que causan un flujo fijo (respecto del estator) en el espacio (debido a las componentes continuas) y otro flujo rotante (debido a las componentes alternas).
El flujo fijo induce en el circuito de excitación (y en los circuitos amortiguadores) una componente alterna, el flujo rotante una componente continua, en consecuencia la corriente de excitación crece, superposición de tres corrientes, la de régimen, un pulso de continua y una componente alterna (en los circuitos amortiguadores la corriente de régimen es nula).
Observemos el flujo total y sus componentes antes y después del cortocircuito.
Examinemos las corrientes (en el circuito de excitación y los amortiguadores) que se incrementan y luego decrecen con constantes de tiempo que dependen de las resistencias en serie a las reactancias XR, XKD y XKT.
Pero esto no es todo, la componente alterna en el circuito de excitación causa un campo pulsante que puede suponerse superposición de dos campos rotantes (respectivamente en sentido contrario y en igual sentido), estos vistos desde el estator se consideran como un campo fijo (el de sentido contrario) y un campo de pulsación doble (el de igual sentido), y este último explica los efectos de segunda armónica que se presentan.
Si hacemos circular corriente en una sola fase del inducido, se producirá un campo pulsante, que también puede suponerse superposición de dos campos rotantes, los efectos se observan en el inductor.
Secuencia inversa, cero y funcionamiento asincrónico
La reactancia inversa XI aparece en el inducido cuando lo alimentamos con una terna de corrientes de secuencia inversa que producen un campo que rota en sentido contrario.
La reactancia homopolar X0, aparece en el inducido cuando lo alimentamos con una terna de corrientes homopolares, su valor depende mucho del acortamiento del paso.
También es de interés analizar la máquina sincrónica fuera de sincronismo, con cierto resbalamiento, y con el circuito de excitación cerrado (con corriente) o abierto (sin corriente), en estos estudios es de particular importancia determinar el par asincrónico.
Se calcula la impedancia equivalente figura 1044 teniendo en cuenta el resbalamiento (que influye en las resistencias que componen el circuito), y se determina la corriente y el par (con la resistencia equivalente).
Si el circuito de excitación se considera abierto, no hay corriente en rr + j xr, se quita esta impedancia, y sólo se considera el resto, determinándose la corriente y el par.
También se determina el par asincrónico según el eje transversal utilizando el correspondiente circuito equivalente figura 1045.
Cálculo de las reactancias
Hasta aquí hemos visto los parámetros de interés en distintas condiciones de funcionamiento y como se utilizan, veamos ahora como se ejecutan los cálculos que se determinan sus valores.
Al iniciar el paso 11, se lee el registro 16 ingresando los valores que permiten realizar el cálculo de la jaula amortiguadora y del anillo:
ALFA2: coeficiente, valores posibles entre 0.15 y 0.30, para hidrogeneradores 0.15, para motores sincrónicos 0.34 a 0.40 (cobre) y 0.5 (bronce) [2].
CPRIMA: es la distancia entre los bordes de la expansión polar y las ranuras externas de la jaula (número de barras por polo entre 5 y 10). En máquinas de pequeña y media potencia se adopta: 3 a 7 mm y para aquellas de mayor potencia: 8 a 10 mm.
CB: coeficiente de resistividad de la barra 1 cobre, 4 latón
CA: coeficiente de resistividad del anillo 1 cobre, 4 latón
QPOL(4): número de barras por polo (entre 5 y 10)
RAB: relación entre la sección del anillo y la sección de las barras por polo, normalmente se adopta 0.5.
Se adopta un paso de las barras amortiguadores TAUC(4) igual al paso de ranura del estator TAUC(1), si el número de ranuras por polo y por fase del estator es menor de 0.9 se adopta TAUC(4) = 0.9 ´ TAUC(1).
Si el número de barras por polo QPOL(4) no se impone entonces el programa fija:

Número de barras total:
QQ(5) = QPOL(4) x NPOL
la sección de las barras:
la sección del anillo de cortocircuito es normalmente de sección rectangular y resulta:
SA(5) = RAB x SA(4) x QPOL(4)
Se determina DIABAR diámetro de las barras en (mm).
Se determina el paso relativo ALFA como la relación entre el paso acortado en ranuras y el número de ranuras por polo:
La reactancia zig-zag XZ resulta:
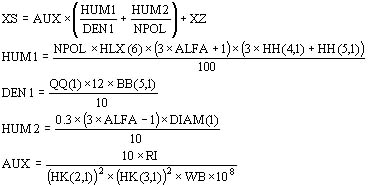
La reactancia de fuga del inducido XS resulta:
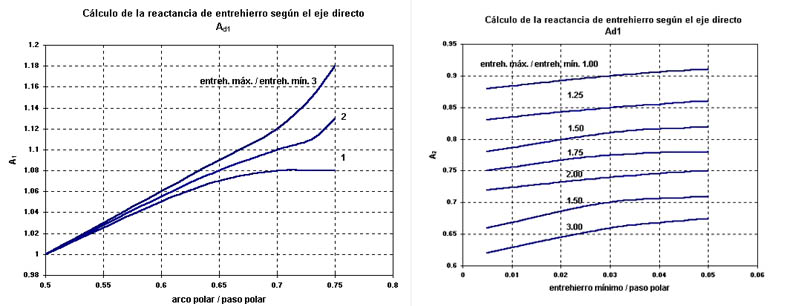
La reactancia de entrehierro según el eje directo (longitudinal):

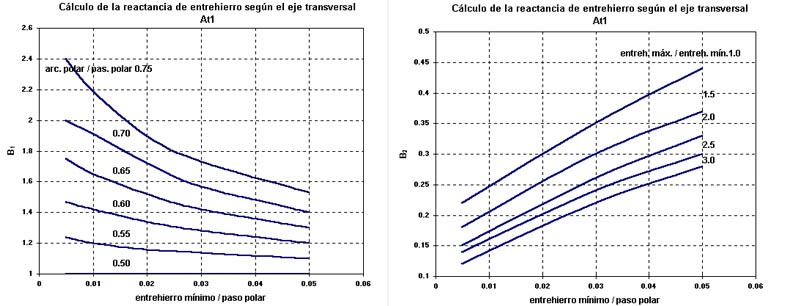
Para calcular la reactancia de entrehierro según el eje transversal (cuadratura) XAT se necesitan los siguiente parámetros que intervienen en su determinación, y que se pueden imponer en el registro 17 que incluye:
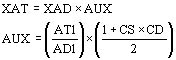
AD1 = AA1´ AA2 (figura 1046A y figura 1046B)
AT1 = BB1´ BB2 (figura 1047A y figura 1047B)
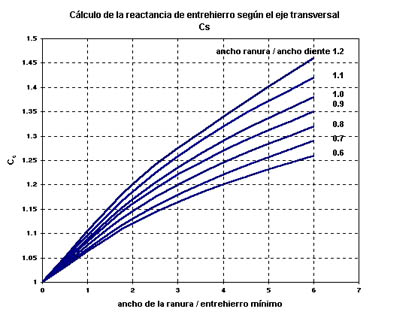
CS: función de las dimensiones de los dientes, ranuras y entrehierro mínimo (figura 1048)
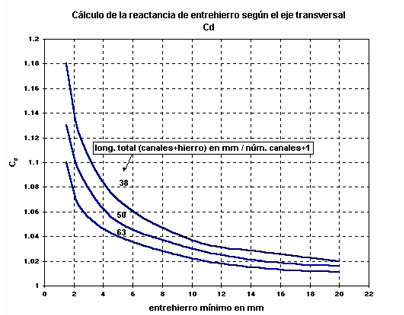
CD: tiene en cuenta la influencia de los canales de ventilación del estator (figura 1049)
HK0: factor amortiguador, si es nulo se adopta el valor 0.5
HLIG: tiene en cuenta si los polos están unidos (ligados) o no entre si (1 / 0)
HLEMAN: número de tubos de Lheman
La reactancia de entrehierro transversal entonces es:
La reactancia de fuga de los inductores resulta:

El valor auxiliar FIR, flujo de fuga de los inductores, se obtiene del trazado de Lehmann mediante la expresión:
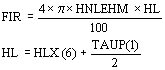
HNLEHM: número de tubos por unidad de longitud entre polos, si es nulo se adopta HNLEHM = 3.2 y HL: longitud interesada por estos tubos.
La reactancia de los amortiguadores, según el eje directo resulta:
siendo QPOL(4) el número de barras de amortiguación por polo.
La reactancia de los amortiguadores según el eje transversal resulta:
XKT = 0.75 x XKD
La reactancia sincrónica según el eje directo (longitudinal) resulta:
XD = XS + XAD
La reactancia sincrónica según el eje transversal:
XT = XS + XAT
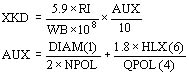
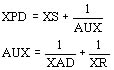
La reactancia transitoria según el eje directo:
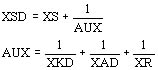
La reactancia subtransitoria según el eje directo:
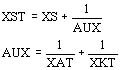
La reactancia subtransitoria según el eje transversal:
La reactancia inversa:
Para el cálculo de la reactancia homopolar X0 se emplea la fórmula de Alger, pudiendo observarse que el valor depende mucho del acortamiento del paso:
Las resistencias
Luego sigue el cálculo de la resistencia de inducido:
La resistencia de inductor:
La resistencia de amortiguadores según eje directo:
La resistencia de amortiguadores según eje transversal, si hay ligazón entre polos:
RKT = 2.4 x AUX3 x (AUX1 + 0.8 x AUX2)
En cambio si no hay ligazón entre polos:
RKT = 7.3 x AUX3 x (AUX1 + 0.2 x AUX2)
Constantes de tiempo de cortocircuito
Se calculan a continuación las constantes de tiempo en cortocircuito, en primer lugar la constante de tiempo del inducido en condiciones de un cortocircuito brusco:
La constante de tiempo transitoria directa:
La constante de tiempo subtransitoria directa:
La constante de tiempo de según el eje transversal de amortiguación:

La constante de tiempo de inducido inductor abierto:

La constante de tiempo de inductores alternador en vacío:
La constante de tiempo de amortiguación (inducido abierto) según el eje transversal:
La constante de tiempo de según el eje directo del arrollamiento amortiguador:
Continúa el cálculo de las reactancias monofásicas (sincrónica directa, transitoria, subtransitoria) que corresponden a un cortocircuito línea-línea y un cortocircuito línea- neutro (temas detallados en el Apéndice 19).
Efectos de las corrientes inducidas en el rotor
En el rotor de las máquinas sincrónicas se tienen diferentes trayectorias alternativas por las cuales pueden establecerse las corrientes inducidas, una es el devanado de excitación las otras son los circuitos adicionales del rotor.
Estos circuitos adicionales se los utiliza en los alternadores de polos salientes para producir una amortiguación después de un transitorio electromecánico y para desarrollar pares de arranque en los motores sincrónicos, que arrancan como asincrónicos.
En las máquinas de rotor liso se pueden inducir corrientes transitorias en el cuerpo alrededor del rotor liso, aunque las trayectorias de corriente no están tan bien definidas como en los circuitos de amortiguación de las máquinas de polos salientes, sus efectos son bastante semejantes.
Las barras amortiguadoras se las utiliza en los generadores para producir pares que ayudan a amortiguar las oscilaciones del rotor de la máquina alrededor de su posición de equilibrio después de perturbaciones transitorias.
Estos pares producen un amortiguamiento porque actúan para desacelerar el rotor cuando su velocidad supera la sincrónica, y para acelerarlo cuando su velocidad es menor que la sincrónica.
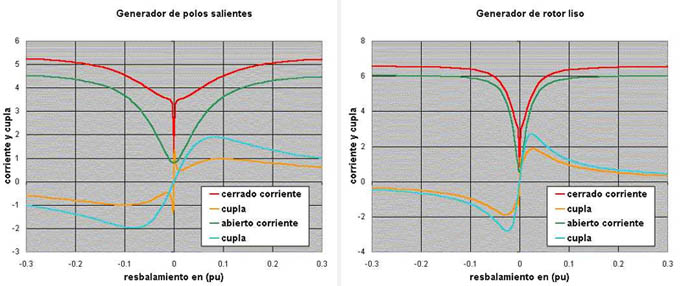
Por último, se determina el par (motriz) de la jaula amortiguadora, y del bobinado de excitación, para cada resbalamiento se determina la corriente y el par, para el circuito de excitación cerrado y abierto.
La figura 1050 muestra como varían ambas corrientes y pares para un ejemplo calculado de un generador sincrónico de polos salientes, la figura 1051 corresponde a un generador rotor liso.
Bibliografía
- "Calcul des réactances, résistences et constantes de temps des machines syncrhones" René DAGUET- Alsthom D 512-11/1958.
- COSTRUZIONI ELETTROMECCANICHE - Enrico Di Pierro volume secondo pag.516 SIDEREA - ROMA.
Conclusiones
Se han propuesto algunas fórmulas de cálculo sencillas utilizables con fines didácticos y que responden a las preguntas del tipo: ¿si pusiera una jaula de tales dimensiones cuánto valdrían los parámetros?
Estas preguntas han surgido al dar acceso a los alumnos a programas de cálculo que permiten realizar con mucha rapidez un correcto (aceptable) dimensionamiento de la máquina eléctrica (sincrónica en este caso).
Con poco esfuerzo se logra una rápida mejora del proyecto, se tiene tiempo para pensar más y el tema que se desea profundizar genera entre otras la pregunta antes señalada.
Esta situación nos ha llevado encarar pequeños programas auxiliares concebidos no como programas de diseño, que partiendo de datos funcionales nos dan la descripción de la geometría (generalizada con las constantes físicas de los materiales utilizados), sino como programas de verificación, en los cuales partiendo de la geometría determinamos los datos funcionales que corresponden.
En su trabajo el proyectista avanza utilizando indistintamente un método u otro (dimensionamiento o verificación) a fin de resolver en forma satisfactoria y lo más cómoda y conveniente posible los problemas que el proyecto genera a quien debe fabricar la máquina y a quien debe sacarle provecho usándola en la mejor forma.
Este último necesita conocerla y para ello pide innumerables datos y garantías creándole un problema difícil al proyectista que debe responder.
Para el uso didáctico en cambio hemos vuelto sobre los programas de calculo y le hemos agregado (en los pasos 10 y 11) las rutinas concebidas como programas auxiliares, de manera que cuando el alumno desarrolla su calculo este finaliza completo con los parámetros que le permiten con otros programas, poner a prueba la máquina como si la hubiera construido, puede utilizarla en una aplicación, someterla a transitorios, ensayarla, simulando que tiene disponible la máquina calculada.
DINAMICA DE LAS MAQUINAS ELECTRICAS
Introducción
Normalmente el cálculo y diseño de las máquinas eléctricas se realiza para condiciones de funcionamiento estable, es decir en condiciones de régimen permanente. En este caso la máquina se la supone funcionando en condiciones definidas durante mucho tiempo, o bien, ajustándose pausadamente de una condición de funcionamiento a otra, de modo que el desequilibrio de energía entre los elementos eléctricos y mecánicos resulte insignificante durante el período transitorio.
Sin embargo, cuando el cambio de una condición de funcionamiento a otra es súbito, no ocurren instantáneamente las modificaciones en las energías magnética y mecánica almacenadas en términos de los elementos giratorios. Como resultado, se necesita un tiempo finito, conocido como periodo transitorio (dinámico), para restaurar el equilibrio de energía de las condiciones iniciales a las finales.
Por ejemplo si la tensión de alimentación de un motor cambia de manera repentina, la máquina pasará por un periodo transitorio antes de alcanzar su nueva condición de estado estable. Otra condición que podría ocasionar una modificación en el equilibrio dinámico de una máquina es un cambio repentino de carga.
Es importante recordar que debido a la no linealidad de los circuitos magnéticos el comportamiento de una máquina frente a un transitorio depende del estado de carga de la misma, es decir que la máquina esté trabajando en una parte de la característica lineal o en un punto de la característica de magnetización donde el material magnético empieza a saturarse.
Dinámica del generador sincrónico
Siempre que ocurra un cambio súbito en el par aplicado al rotor o en la corriente erogada por la carga de un generador, éste necesita un tiempo finito antes de alcanzar su nueva condición de estado estable. El funcionamiento del generador durante ese periodo finito se llama funcionamiento transitorio. En realidad, se pueden considerar dos tipos de funcionamiento transitorio de un generador: un transitorio eléctrico y un transitorio mecánico.
El transitorio eléctrico más severo que puede ocurrir en un generador sincrónico es el desarrollo de un cortocircuito súbito trifásico en sus bornes. Sin entrar en detalles se recuerda que en estas condiciones la máquina intenta mantener concatenamientos constantes de flujo para cada una de las tres fases. En la práctica se examina la forma de onda de la corriente dividiéndola en tres periodos: subtransitorio, transitorio y de estado estable. Para ello es importante poder determinar el valor de las correspondientes reactancias subtransitoria, transitoria y sincrónica que corresponden a cada uno de los periodos en que se subdivide el fenómeno.
El transitorio mecánico de un generador que se desarrolla lentamente debido a la elevada inercia, es una de los transitorios más peligrosos porque pueden causar la autodestrucción del generador.
Supongamos que un generador sincrónico está conectado a una barra considerada infinita y que está suministrando la energía requerida. En condiciones de funcionamiento estable, la tensión en bornes y frecuencia son las mismas que las de la barra infinita, para lo cual la máquina de impulso primario debe hacerlo girar a su velocidad sincrónica. Cualquier incremento de la velocidad del generador se traduce en energía eléctrica desarrollada por él. En condiciones de funcionamiento estable la potencia de salida del generador es igual a la potencia de entrada si se desprecian las pérdidas.
Cualquier modificación repentina en la potencia suministrada por el generador, implica igualmente un cambio repentino del ángulo de potencia d . Sin embargo este ángulo no puede cambiar súbitamente debido a la inercia del rotor. Esto conduce a una situación en la que la potencia de entrada no es igual a la potencia de salida. La diferencia entre ellas origina un cambio en la energía cinética del rotor, lo que afecta su velocidad.
Durante este periodo transitorio, el rotor desacelera o acelera hasta que las potencias de entrada y salida se igualen nuevamente. Cuando esto ocurre el rotor recupera su velocidad sincrónica. Un fenómeno similar de ajustes de velocidad también tiene lugar cuando se desarrolla un cortocircuito repentino a través de los bornes del generador.
En resumen cuando las condiciones en que opera una máquina eléctrica cambian abruptamente, no puede responder de manera instantánea al cambio debido a la inercia.
El estudio de los transitorios en las máquinas eléctricas es difícil por su naturaleza compleja, sin embargo algunas suposiciones simplificadoras razonables reducen en forma significativa la complejidad del estudio.
Dinámica del motor asincrónico
Análogamente a lo dicho para máquinas sincrónicas, para los motores de inducción, en particular de gran potencia, los problemas dinámicos más comunes que se presentan están relacionados con el arranque y detención y con su capacidad para continuar funcionando durante serias perturbaciones del sistema eléctrico de alimentación.
Los métodos de representación del motor de inducción para estos estudios dinámicos dependen de la naturaleza y complejidad del problema y de los requisitos de exactitud asociados.
Cuando se requiere estudiar además del transitorio mecánico el transitorio eléctrico es necesario recurrir a métodos de cálculo más complejos que requieren el conocimiento de parámetros eléctricos del motor como así también el momento de inercia J de la carga y del rotor.
La norma IEC 60034-12 establece un régimen de arranque mínimo que los motores deben ser capaces de soportar:
a) Dos arranque sucesivos, el primero con el motor frío, y el segundo inmediatamente después pero luego de haberlo desacelerado hasta lograr el reposo (simula un arranque malogrado).
b) Un arranque con motor caliente (desenergización en forma accidental durante el funcionamiento normal).
El calentamiento durante el arranque depende de la inercia de las partes giratorias de la carga movida, la norma establece los valores máximos de inercia de la carga para los cuales el motor debe ser capaz de cumplir las condiciones mencionadas, la expresión es válida para motores de 2, 4, 6 y 8 polos.
El programa MOTOCA determina el momento de inercia máximo de la carga Jc (kgm2) en función de la frecuencia de alimentación mediante la expresión:
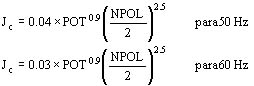
y también el momento de inercia del motor.
En el caso que la máquina accionada tiene una velocidad diferente a la del motor (accionamiento a través de poleas o engranajes), se deberá referir el momento de inercia de la carga al eje del motor mediante la relación:

siendo nc la velocidad de la carga y nm la del motor.
Determinación del factor de inercia GD2
Como hemos visto en muchas aplicaciones y en especial, siempre que un generador eléctrico va acoplado a una máquina motriz, hidráulica, de vapor o de gas, es necesario conocer el denominado factor de inercia o GD2 de la parte rotativa.
En esta expresión, común entre los constructores de máquinas, D representa un determinado diámetro en metros y G el peso en kg. Se trata de una magnitud mecánica necesaria para estudiar el sistema regulador de las turbinas hidráulicas y valor las variaciones de velocidad a que está sometida la máquina cuando la carga varía súbitamente, también para el estudio de funcionamiento en paralelo de los alternadores.
El momento de inercia J (kgm2) es el producto de la masa rotante por el cuadrado del radio de giro, es una medida de la resistencia que ofrece un cuerpo a un cambio en su movimiento de rotación alrededor de un eje dado y esta magnitud se utiliza para los cálculos.
Reemplazando en la expresión del GD2 el peso dado en kg por la relación peso = m x g se obtiene:
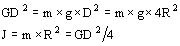
es decir el momento de inercia J en kgm2 (kg masa) se obtiene dividiendo el GD2 en kgm2 (kg peso) por 4.
En los acoplamientos con turbinas hidráulicas (máquinas de par constante) la inercia de la parte rotativa es necesaria para impedir variaciones de velocidad excesivas al variar bruscamente la carga, de forma que el regulador tenga tiempo de actuar.
Las turbinas de vapor también desarrollan un par constante como las hidráulicas, su parte móvil siempre tiene una inercia suficiente para impedir variaciones excesivas de velocidad en los cambios bruscos de carga, antes de que actué el regulador. Los grupos turbogeneradores nunca están provistos de volante ni es necesario aumentar el GD2 del rotor del alternador.
Cuando la máquina eléctrica está acoplada directamente a un motor diesel, la acción de un volante es necesaria para regular la velocidad de rotación en cada instante.
En la práctica, siendo suficiente valores aproximados, se recurre a fórmulas que simplifican el cálculo.
Para el generador de polos salientes se calcula el GD2 de cada una de las partes que conforman el rotor, es decir, los polos incluyendo el devanado de excitación, la corona rotórica y si se trata de generadores acoplados a turbinas hidráulicas que son máquinas de gran diámetro de los radios o de la estructura mecánica que vincula el cubo del eje con la corona rotórica propiamente dicha.
Para el cálculo del GD2 de los polos:

siendo:
NPOL: número de polos
PEPOL: B17 + B18 + PESC(2) (kg)
B17 = 2/3 (2 x APP x BCP + 2 x APP x BPP)x HLX(12) x DENFE x 10-6 Peso expansión polar (kg)
B18 = HH (1,2) x BB (4,2) x HLX (12) x DENFE x 10-6 Peso cuello del polo (kg)
DIAM(2): diámetro exterior del rotor (mm)
APP: semicuerda expansión polar (mm)
BCP: altura centro expansión (mm)
BPP: altura extremo expansión polar (mm)
HLX(12): longitud del hierro (mm)
DENFE: SAE 1010 igual a 7.8 (kg/dm3)
HH(1,2): altura cuello polo (mm)
BB(4,2): ancho cuello polo (mm)
PESC(2): peso bobina excitación de un polo (kg)
Para el cálculo del GD2 de la corona rotórica (llanta de sección rectangular):

siendo:
 Peso de la corona (kg)
Peso de la corona (kg)
DIAEXT = DIAM(2)-2´ (BCP+HH(1,2): diámetro externo de la corona (mm)
DIAINT = DIAEXT-2´ HC(2): diámetro interno de la corona(mm)
HC(2): altura de la corona (mm)
El programa SINCRO que se utiliza para realizar el dimensionamiento electromagnético de la máquina sincrónica de polos salientes determina todos los valores utilizados en estas fórmulas, también determina el diámetro del eje en el paquete rotórico (DEJE), pero no su largo total, y para el caso de máquinas de alta polaridad (gran diámetro), por razones de simplicidad, no realiza el cálculo de los radios, cubo, etc. que conforman la estructura mecánica de la rueda polar. Para estimar con cierta aproximación esta parte del rotor, en base a una verificación de cálculo realizado con una máquina conocida, se puede suponer que el GD2 correspondiente incluyendo el eje es del orden de 3 a 3.4 veces el valor que se obtiene como suma del GD2 de los polos más el GD2 de la corona rotórica.
Para alternadores de polos lisos el rotor es un cuerpo cilíndrico de acero con ranuras longitudinales en las que se encuentra el devanado de excitación formando dientes angostos y además dientes anchos sin devanado (ver Capítulo 4 figura 4.2).
Esta parte del rotor se la puede considerar como una llanta de sección rectangular y para el cálculo del GD2 de los dientes más la bobina de excitación:

siendo:
PESH(2,2): peso dientes angostos (kg)
PESH(2,4): peso dientes anchos (kg)
HH(6,2): profundidad de ranura rotórica (mm)
Como el rotor de estas máquinas puede estar formado por una sola pieza forjada que también comprende los extremos del eje, se supone para el cálculo del GD2 de la corona como si se tratase de un disco cuya longitud es la del rotor, en consecuencia no se tienen en cuenta en los cálculos los extremos del eje:

siendo:
PESH(2,1): peso de la corona (kg)
El programa MOTOCA que se utiliza para realizar el dimensionamiento electromagnético de la máquina asincrónica determina todos los valores utilizados en estas fórmulas.
Para un motor asincrónico con rotor jaula simple el GD2 de los dientes más las barras y anillos:

siendo:
PESH(2,2): peso de los dientes rotóricos (kg)
PESC(J2): peso de las barras (kg)
PESC(J3): peso de los anillos (kg)
Finalmente para el cálculo del GD2 de la corona también se la considera como si fuese un disco cuya longitud es la del rotor, no teniéndose en cuenta los extremos del eje:

siendo:
PESH(2,1): peso de la corona rotórica (kg)

Copyright 2008 - 2012 INDUCOR INGENIERIA S.A. | Todos los derechos reservados | CCS | HTML